About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 45 results movement clear
FNNR-ABM
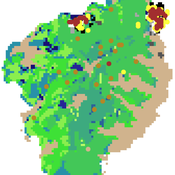
Judy Mak | Published Thursday, February 28, 2019 | Last modified Saturday, December 07, 2019FNNR-ABM is an agent-based model that simulates human activity, Guizhou snub-nosed monkey movement, and GTGP-enrolled land parcel conversion in the Fanjingshan National Nature Reserve in Guizhou, China.
Quick-start guide:
1. Install Python and set environmental path variables.
2. Install the mesa, matplotlib (optional), and pyshp (optional) Python libraries.
3. Configure fnnr_config_file.py.
…
Modeling the emergence of migratory corridors and foraging hotspots of the green sea turtle
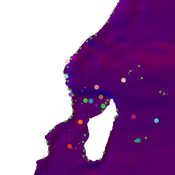
Mayeul Dalleau Volker Grimm Jérôme Bourjea Stephanie Kramer-Schadt | Published Friday, April 05, 2019 | Last modified Tuesday, September 17, 2019The model represents migration of the green sea turtle, Chelonia mydas, between foraging and breeding sites in the Southwest Indian Ocean. The purpose of the model is to investigate the impact of local environmental conditions, including the quality of foraging sites and ocean currents, on emerging migratory corridors and reproductive output and to thereby identify conservation priority sites.
Corresponding article to found here: https://onlinelibrary.wiley.com/doi/epdf/10.1002/ece3.5552

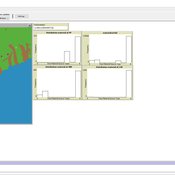
Peer reviewed Organizational behavior in the hierarchy model
Smarzhevskiy Ivan | Published Tuesday, June 18, 2019 | Last modified Wednesday, July 31, 2019In a two-level hierarchical structure (consisting of the positions of managers and operators), persons holding these positions have a certain performance and the value of their own (personal perception in this, simplified, version of the model) perception of each other. The value of the perception of each other by agents is defined as a random variable that has a normal distribution (distribution parameters are set by the control elements of the interface).
In the world of the model, which is the space of perceptions, agents implement two strategies: rapprochement with agents that perceive positively and distance from agents that perceive negatively (both can be implemented, one of these strategies, or neither, the other strategy, which makes the agent stationary). Strategies are implemented in relation to those agents that are in the radius of perception (PerRadius).
The manager (Head) forms a team of agents. The performance of the group (the sum of the individual productivities of subordinates, weighted by the distance from the leader) varies depending on the position of the agents in space and the values of their individual productivities. Individual productivities, in the current version of the model, are set as a random variable distributed evenly on a numerical segment from 0 to 100. The manager forms the team 1) from agents that are in (organizational) radius (Op_Radius), 2) among agents that the manager perceives positively and / or negatively (both can be implemented, one of the specified rules, or neither, which means the refusal of the command formation).
Agents can (with a certain probability, given by the variable PrbltyOfDecisn%), in case of a negative perception of the manager, leave his group permanently.
It is possible in the model to change on the fly radii values, update the perception value across the entire population and the perception of an individual agent by its neighbors within the perception radius, and the probability values for a subordinate to make a decision about leaving the group.
You can also change the set of strategies for moving agents and strategies for recruiting a team manager. It is possible to add a randomness factor to the movement of agents (Stoch_Motion_Speed, the default is set to 0, that is, there are no random movements).
…
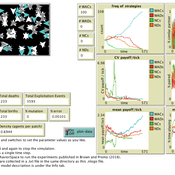
Opportunity cost of walking away in the spatial iterated prisoner's dilemma
Luke Premo | Published Wednesday, April 03, 2019Previous work with the spatial iterated prisoner’s dilemma has shown that “walk away” cooperators are able to outcompete defectors as well as cooperators that do not respond to defection, but it remains to be seen just how robust the so-called walk away strategy is to ecologically important variables such as population density, error, and offspring dispersal. Our simulation experiments identify socio-ecological conditions in which natural selection favors strategies that emphasize forgiveness over flight in the spatial iterated prisoner’s dilemma. Our interesting results are best explained by considering how population density, error, and offspring dispersal affect the opportunity cost associated with walking away from an error-prone partner.
The Opportunistic Acquisition Model of Stone Tool Raw Material Procurement
Simen Oestmo Marco Janssen Haley Cawthra | Published Friday, April 21, 2017 | Last modified Sunday, March 10, 2019The Opportunistic Acquisition Model (OAM) posits that the archaeological lithic raw material frequencies are due to opportunistic encounters with sources while randomly walking in an environment.
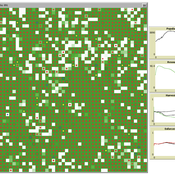
Absorption of particulate matter by leafs
Chiara Letter Georg Jäger | Published Monday, November 12, 2018 | Last modified Monday, November 12, 2018This model aims to understand the interaction between particulate matter and leaves of trees. The particles collide with the leaf and can either be absorbed with a certain probability, otherwise they bounce off it. The absorptions are detected in a counter.
The movement of the particles depends mainly on the strength and direction of the wind and the air temperature. They also show a certain random movement, but the proportion is negligible.
In a collision with the leaf, the particles are absorbed with a certain probability (absorption-probability), otherwise repelled.
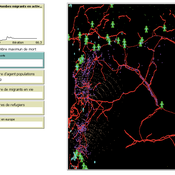
RefugeePathSIM Model
Guillaume Arnoux Hébert Liliana Perez Saeed Harati | Published Thursday, October 11, 2018 | Last modified Tuesday, October 16, 2018RefugeePathSIM is an agent-based model to simulate the movement behavior of refugees in order to identify pathways of forced migration under crisis. The model generates migrants and lets them leave conflict areas for a destination that they choose based on their characteristics and desires. RefugeePathSIM has been developed and applied in a study of the Syrian war, using monthly data in years 2011-2015.
Managing Connectivity: insights from modelling species interactions accross multiple scales in an idealized landscape
Jacopo Baggio Kehinde Salau Michael Schoon Marco Janssen | Published Monday, October 01, 2012 | Last modified Monday, January 20, 2014The model objective’s is to explore the management choice set to uncover which subsets of strategies are most effective at maximizing species coexistence on a fragmented landscape.
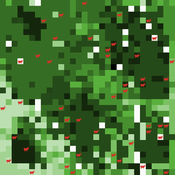
Mobility, Resource Harvesting and Robustness of Social-Ecological Systems
Irene Perez Ibarra | Published Monday, September 24, 2012 | Last modified Saturday, April 27, 2013The model is a stylized representation of a social-ecological system of agents moving and harvesting a renewable resource. The purpose is to analyze how mobility affects sustainability. Experiments changing agents’ mobility, landscape and information governments have can be run.
Peer reviewed Ideal Free Distribution of Mobile Pastoralists in the Logone Floodplain, Cameroon
Mark Moritz Ian M Hamilton Andrew Yoak Hongyang Pi Jeff Cronley Paul Maddock | Published Thursday, June 19, 2014 | Last modified Saturday, January 06, 2018The purpose of the model is to examine whether and how mobile pastoralists are able to achieve an Ideal Free Distribution (IFD).
Displaying 10 of 45 results movement clear