About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 52 results movement clear search
This model was developed to test the usability of evolutionary computing and reinforcement learning by extending a well known agent-based model. Sugarscape (Epstein & Axtell, 1996) has been used to demonstrate migration, trade, wealth inequality, disease processes, sex, culture, and conflict. It is on conflict that this model is focused to demonstrate how machine learning methodologies could be applied.
The code is based on the Sugarscape 2 Constant Growback model, availble in the NetLogo models library. New code was added into the existing model while removing code that was not needed and modifying existing code to support the changes. Support for the original movement rule was retained while evolutionary computing, Q-Learning, and SARSA Learning were added.
Individual-based model to "Intraspecific trait variation in personality‐related movement behavior promotes coexistence" (Milles et al., 2020)
Alexander Milles | Published Monday, June 22, 2020The community consequences of intra-specific trait variation (ITV) are a current topic in ecological research. The effects of ITV on species coexistence have, yet, not sufficiently been understood. With this individual-based model we analyzed the effect of intra-specific variation in movement by mimicking variation found in ground-dwelling rodents and analyzing how such variation affects inter-specific differences in competitive ability (i.e. foraging efficiency) and temporary coexistence. The movement algorithm and behavioral plasticity was adapted from existing algorithms and current ecological literature. As a measure for temporary coexistence, we analyzed the time until one of the species went extinct.
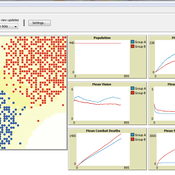
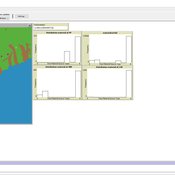
Non-attentional visual information transmission in groups under predation
J. Fransje Weerden, van | Published Wednesday, March 25, 2020Our aim is to show effects of group living when only low-level cognition is assumed, such as pattern recognition needed for normal functioning, without assuming individuals have knowledge about others around them or warn them actively.
The model is of a group of vigilant foragers staying within a patch, under attack by a predator. The foragers use attentional scanning for predator detection, and flee after detection. This fleeing action constitutes a visual cue to danger, and can be received non-attentionally by others if it occurs within their limited visual field. The focus of this model is on the effectiveness of this non-attentional visual information reception.
A blind angle obstructing cue reception caused by behaviour can exist in front, morphology causes a blind angle in the back. These limitations are represented by two visual field shapes. The scan for predators is all-around, with distance-dependent detection; reception of flight cues is limited by visual field shape.
Initial parameters for instance: group sizes, movement, vision characteristics for predator detection and for cue reception. Captures (failure), number of times the information reached all individuals at the same time (All-fled, success), and several other effects of the visual settings are recorded.
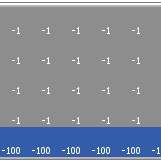
Cliff Walking with Q-Learning NetLogo Extension
Kevin Kons Fernando Santos | Published Tuesday, December 10, 2019This model implements a classic scenario used in Reinforcement Learning problem, the “Cliff Walking Problem”. Consider the gridworld shown below (SUTTON; BARTO, 2018). This is a standard undiscounted, episodic task, with start and goal states, and the usual actions causing movement up, down, right, and left. Reward is -1 on all transitions except those into the region marked “The Cliff.” Stepping into this region incurs a reward of -100 and sends the agent instantly back to the start (SUTTON; BARTO, 2018).
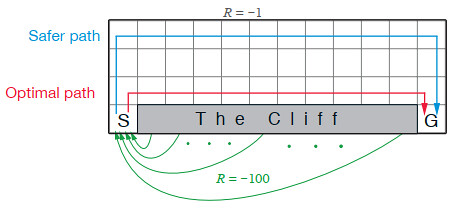
The problem is solved in this model using the Q-Learning algorithm. The algorithm is implemented with the support of the NetLogo Q-Learning Extension
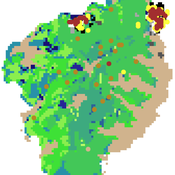
FNNR-ABM
Judy Mak | Published Thursday, February 28, 2019 | Last modified Saturday, December 07, 2019FNNR-ABM is an agent-based model that simulates human activity, Guizhou snub-nosed monkey movement, and GTGP-enrolled land parcel conversion in the Fanjingshan National Nature Reserve in Guizhou, China.
Quick-start guide:
1. Install Python and set environmental path variables.
2. Install the mesa, matplotlib (optional), and pyshp (optional) Python libraries.
3. Configure fnnr_config_file.py.
…
Modeling the emergence of migratory corridors and foraging hotspots of the green sea turtle
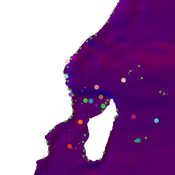
Mayeul Dalleau Volker Grimm Jérôme Bourjea Stephanie Kramer-Schadt | Published Friday, April 05, 2019 | Last modified Tuesday, September 17, 2019The model represents migration of the green sea turtle, Chelonia mydas, between foraging and breeding sites in the Southwest Indian Ocean. The purpose of the model is to investigate the impact of local environmental conditions, including the quality of foraging sites and ocean currents, on emerging migratory corridors and reproductive output and to thereby identify conservation priority sites.
Corresponding article to found here: https://onlinelibrary.wiley.com/doi/epdf/10.1002/ece3.5552
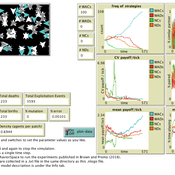
Opportunity cost of walking away in the spatial iterated prisoner's dilemma
Luke Premo | Published Wednesday, April 03, 2019Previous work with the spatial iterated prisoner’s dilemma has shown that “walk away” cooperators are able to outcompete defectors as well as cooperators that do not respond to defection, but it remains to be seen just how robust the so-called walk away strategy is to ecologically important variables such as population density, error, and offspring dispersal. Our simulation experiments identify socio-ecological conditions in which natural selection favors strategies that emphasize forgiveness over flight in the spatial iterated prisoner’s dilemma. Our interesting results are best explained by considering how population density, error, and offspring dispersal affect the opportunity cost associated with walking away from an error-prone partner.
The Opportunistic Acquisition Model of Stone Tool Raw Material Procurement
Simen Oestmo Marco Janssen Haley Cawthra | Published Friday, April 21, 2017 | Last modified Sunday, March 10, 2019The Opportunistic Acquisition Model (OAM) posits that the archaeological lithic raw material frequencies are due to opportunistic encounters with sources while randomly walking in an environment.
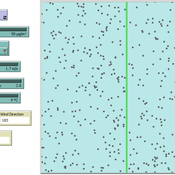
Absorption of particulate matter by leafs
Chiara Letter Georg Jäger | Published Monday, November 12, 2018 | Last modified Monday, November 12, 2018This model aims to understand the interaction between particulate matter and leaves of trees. The particles collide with the leaf and can either be absorbed with a certain probability, otherwise they bounce off it. The absorptions are detected in a counter.
The movement of the particles depends mainly on the strength and direction of the wind and the air temperature. They also show a certain random movement, but the proportion is negligible.
In a collision with the leaf, the particles are absorbed with a certain probability (absorption-probability), otherwise repelled.
RefugeePathSIM Model
Guillaume Arnoux Hébert Liliana Perez Saeed Harati | Published Thursday, October 11, 2018 | Last modified Tuesday, October 16, 2018RefugeePathSIM is an agent-based model to simulate the movement behavior of refugees in order to identify pathways of forced migration under crisis. The model generates migrants and lets them leave conflict areas for a destination that they choose based on their characteristics and desires. RefugeePathSIM has been developed and applied in a study of the Syrian war, using monthly data in years 2011-2015.
Displaying 10 of 52 results movement clear search