About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 1203 results
Proof of principle for a self-governing prediction and forecasting reward algorithm: Modeling consensus of a group of experts in adversarial collaboration.
Jose Osvaldo Gonzalez Hernandez Ted C. Rogers Jonathan Marino Brandon Velasco | Published Sunday, May 14, 2023Package for simulating the behavior of experts in a scientific-forecasting competition, where the outcome of experiments itself depends on expert consensus. We pay special attention to the interplay between expert bias and trust in the reward algorithm. The package allows the user to reproduce results presented in arXiv:2305.04814, as well as testing of other different scenarios.
Agent based modeling of the effects of carbon payments and forest owner cooperatives on carbon storage and revenue in Pacific Northwest forestlands.
Dan Brown Pranab Roy Chowdhury | Published Tuesday, May 09, 2023The Olympic Peninsula ABM works as a virtual laboratory to simulate the existing forestland management practices as followed by different forestland owner groups in the Olympic Peninsula, Washington, and explore how they could shape the future provisions of multifunctional ecosystem services such as Carbon storage and revenue generation under the business-as-usual scenario as well as by their adaptation to interventions. Forestlands are socio-ecological systems that interact with economic, socio-cultural, and policy systems. Two intervention scenarios were introduced in this model to simulate the adaptation of landowner behavior and test the efficacy of policy instruments in promoting sustainable forest practices and fostering Carbon storage and revenue generation. (1) A market-linked carbon offset scheme that pays the forestland owners a financial incentive in the form of a yearly carbon rent. (2) An institutional intervention policy that allows small forest owners (SFLO) to cooperate for increased market access and benefits under carbon rent scenario. The model incorporates the heterogeneous contexts within which the forestland owners operate and make their forest management decisions by parameterizing relevant agent attributes and contextualizing their unique decision-making processes.
Peer reviewed SWIRS Spread of a woody invader in riparian systems
Moira Zellner Beatriz Sosa Carlos Andrés Chiale | Published Tuesday, May 09, 2023Riparian forests are one of the most vulnerable ecosystems to the development of biological invasions, therefore limiting their spread is one of the main challenges for conservation. The main factors that explain plant invasions in these ecosystems are the capacity for both short- and long-distance seed dispersion, and the occurrence of suitable habitats that facilitate the establishment of the invasive species. Large floods constitute an abiotic filter for invasion.
This model simulates the spatio-temporal spread of the woody invader Gleditsia. triacanthos in the riparian forest of the National Park Esteros de Farrapos e Islas del Río Uruguay, a riparian system in the coast of the Uruguay river (South America). In this model, we represent different environmental conditions for the development of G. triacanthos, long- and short-distance spread of its fruits, and large floods as the main factor of mortality for fruit and early stages.
Field results show that the distribution pattern of this invasive species is limited by establishment, i.e. it spreads locally through the expansion of small areas, and remotely through new invasion foci. This model recreates this dispersion pattern. We use this model to derive management implications to control the spread of G. triacanthos
Correlated random walk (Javascript)
Viktoriia Radchuk Uta Berger Thibault Fronville | Published Tuesday, May 09, 2023The first simple movement models used unbiased and uncorrelated random walks (RW). In such models of movement, the direction of the movement is totally independent of the previous movement direction. In other words, at each time step the direction, in which an individual is moving is completely random. This process is referred to as a Brownian motion.
On the other hand, in correlated random walks (CRW) the choice of the movement directions depends on the direction of the previous movement. At each time step, the movement direction has a tendency to point in the same direction as the previous one. This movement model fits well observational movement data for many animal species.
The presented agent based model simulated the movement of the agents as a correlated random walk (CRW). The turning angle at each time step follows the Von Mises distribution with a ϰ of 10. The closer ϰ gets to zero, the closer the Von Mises distribution becomes uniform. The larger ϰ gets, the more the Von Mises distribution approaches a normal distribution concentrated around the mean (0°).
In this script the turning angles (following the Von Mises distribution) are generated based on the the instructions from N. I. Fisher 2011.
This model is implemented in Javascript and can be used as a building block for more complex agent based models that would rely on describing the movement of individuals with CRW.
Peer reviewed Correlated Random Walk (NetLogo)
Viktoriia Radchuk Uta Berger Thibault Fronville | Published Tuesday, May 09, 2023 | Last modified Monday, December 18, 2023This is NetLogo code that presents two alternative implementations of Correlated Random Walk (CRW):
- 1. drawing the turning angles from the uniform distribution, i.e. drawing the angle with the same probability from a certain given range;
- 2. drawing the turning angles from von Mises distribution.
The move lengths are drawn from the lognormal distribution with the specified parameters.
Correlated Random Walk is used to represent the movement of animal individuals in two-dimensional space. When modeled as CRW, the direction of movement at any time step is correlated with the direction of movement at the previous time step. Although originally used to describe the movement of insects, CRW was later shown to sufficiently well describe the empirical movement data of other animals, such as wild boars, caribous, sea stars.
…
Confirmation Bias improves Performance in a Signal Detection Task and evolves in an Evolutionary Algorithm
Michael Vogrin | Published Monday, May 08, 2023Confirmation Bias is usually seen as a flaw of the human mind. However, in some tasks, it may also increase performance. Here, agents are confronted with a number of binary Signals (A, or B). They have a base detection rate, e.g. 50%, and after they detected one signal, they get biased towards this type of signal. This means, that they observe that kind of signal a bit better, and the other signal a bit worse. This is moderated by a variable called “bias_effect”, e.g. 10%. So an agent who detects A first, gets biased towards A and then improves its chance to detect A-signals by 10%. Thus, this agent detects A-Signals with the probability of 50%+10% = 60% and detects B-Signals with the probability of 50%-10% = 40%.
Given such a framework, agents that have the ability to be biased have better results in most of the scenarios.
Multi-agent modeling and analysis of the knowledge learning of a human-machine hybrid intelligent organization with human-machine trust
Haoxiang Zhang | Published Monday, April 24, 2023Machine learning technologies have changed the paradigm of knowledge discovery in organizations and transformed traditional organizational learning to human-machine hybrid intelligent organizational learning. However, it remains unclear how human-machine trust, which is an important factor that influences human-machine knowledge exchange, affects the effectiveness of human-machine hybrid intelligent organizational learning. To explore this issue, we used multi-agent simulation to construct a knowledge learning model of a human-machine hybrid intelligent organization with human-machine trust.
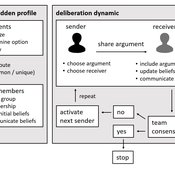
Agent-based model of team decision-making in hidden profile situations
Andreas Flache Jonas Stein Vincenz Frey | Published Thursday, April 20, 2023 | Last modified Friday, November 17, 2023The model presented here is extensively described in the paper ‘Talk less to strangers: How homophily can improve collective decision-making in diverse teams’ (forthcoming at JASSS). A full replication package reproducing all results presented in the paper is accessible at https://osf.io/76hfm/.
Narrative documentation includes a detailed description of the model, including a schematic figure and an extensive representation of the model in pseudocode.
The model develops a formal representation of a diverse work team facing a decision problem as implemented in the experimental setup of the hidden-profile paradigm. We implement a setup where a group seeks to identify the best out of a set of possible decision options. Individuals are equipped with different pieces of information that need to be combined to identify the best option. To this end, we assume a team of N agents. Each agent belongs to one of M groups where each group consists of agents who share a common identity.
The virtual teams in our model face a decision problem, in that the best option out of a set of J discrete options needs to be identified. Every team member forms her own belief about which decision option is best but is open to influence by other team members. Influence is implemented as a sequence of communication events. Agents choose an interaction partner according to homophily h and take turns in sharing an argument with an interaction partner. Every time an argument is emitted, the recipient updates her beliefs and tells her team what option she currently believes to be best. This influence process continues until all agents prefer the same option. This option is the team’s decision.
Urban waterlogging disaster evaluation based on complex network a case study of Zhengzhou, China
Chao Ding Jia Xu | Published Monday, April 17, 2023The model constructs a complex network of traffic based on the main urban area of Zhengzhou, China, and simulates the urban rainfall process using the ABM model to analyse the real-time risk of flooding hazards in the nodes of the complex network.
An Opinion Dynamics of Science? Agent-Based Modeling of Knowledge Spread
Bernardo Buarque | Published Thursday, April 13, 2023We present a socio-epistemic model of science inspired by the existing literature on opinion dynamics. In this model, we embed the agents (or scientists) into social networks - e.g., we link those who work in the same institutions. And we place them into a regular lattice - each representing a unique mental model. Thus, the global environment describes networks of concepts connected based on their similarity. For instance, we may interpret the neighbor lattices as two equivalent models, except one does not include a causal path between two variables.
Agents interact with one another and move across the epistemic lattices. In other words, we allow the agents to explore or travel across the mental models. However, we constrain their movements based on absorptive capacity and cognitive coherence. Namely, in each round, an agent picks a focal point - e.g., one of their colleagues - and will move towards it. But the agents’ ability to move and speed depends on how far apart they are from the focal point - and if their new position is cognitive/logic consistent.
Therefore, we propose an analytical model that examines the connection between agents’ accumulated knowledge, social learning, and the span of attitudes towards mental models in an artificial society. While we rely on the example from the General Theory of Relativity renaissance, our goal is to observe what determines the creation and diffusion of mental models. We offer quantitative and inductive research, which collects data from an artificial environment to elaborate generalized theories about the evolution of science.
Displaying 10 of 1203 results