About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 13 results for "Obi Thompson Sargoni" clear search
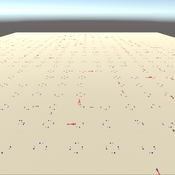
3D Urban Traffic Simulator (ABM) in Unity
Sedar Olmez Obi Thompson Sargoni Alison Heppenstall Daniel Birks Annabel Whipp Ed Manley | Published Friday, January 22, 2021 | Last modified Monday, March 22, 2021The Urban Traffic Simulator is an agent-based model developed in the Unity platform. The model allows the user to simulate several autonomous vehicles (AVs) and tune granular parameters such as vehicle downforce, adherence to speed limits, top speed in mph and mass. The model allows researchers to tune these parameters, run the simulator for a given period and export data from the model for analysis (an example is provided in Jupyter Notebook).
The data the model is currently able to output are the following:
…
FEARLUS-SPOMM
Gary Polhill Nick Gotts Alistair Law Luis Izquierdio Alessandro Gimona Lee-Ann Sutherland Dawn Parker | Published Friday, March 25, 2016This is a coupled conceptual model of agricultural land decision-making and incentivisation and species metacommunities.
The role of argument strength and informational biases in polarization and bipolarization effects
Davide Chiarella Carlo Proietti | Published Thursday, March 30, 2023The model explores the informational causes of polarization and bi-polarization of opinions in groups. To this end it expands the model of the Argument Communication Theory of Bi-polarization. The latter is an argument-based multi-agent model of opinion dynamics inspired by Persuasive Argument Theory. The original model can account for polarization as an outcome of pure informational influence, and reproduces bi-polarization effects by postulating an additional mechanism of homophilous selection of communication partners. The expanded model adds two dimensions: argument strength and more sophisticated protocols of informational influence (argument communication and opinion update).
Survival analysis and Population viability analysis of the Northern Bald Ibis
Sinah Drenske Viktoriia Radchuk Cédric Scherer Corinna Esterer Ingo Kowarik Johannes Fritz Stephanie Kramer-Schadt | Published Thursday, August 04, 2022This is the full repository to run the survival analysis (in R) and run the population viability model and its analysis (NetLogo + R) of the Northern Bald Ibis (NBI) presented in the study
On the road to self-sustainability: Reintroduced migratory European Northern Bald Ibises (Geronticus eremita) still need management interventions for population viability
by Sinah Drenske, Viktoriia Radchuk, Cédric Scherer, Corinna Esterer, Ingo Kowarik, Johannes Fritz, Stephanie Kramer-Schadt
…
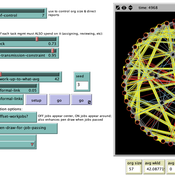
Formal Organization Hierarchy and Informal Networks - "The Company Behind the Org Chart"
Tom Briggs | Published Sunday, April 18, 2021A generalized organizational agent- based model (ABM) containing both formal organizational hierarchy and informal social networks simulates organizational processes that occur over both formal network ties and informal networks.
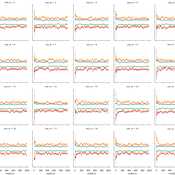
Peer reviewed Dynamic Equilibria Prediction: Experience-Weighted Attraction (EWA), Python Implementation
Vinicius Ferraz | Published Friday, December 02, 2022This project is based on a Jupyter Notebook that describes the stepwise implementation of the EWA model in bi-matrix ( 2×2 ) strategic-form games for the simulation of economic learning processes. The output is a dataset with the simulated values of Attractions, Experience, selected strategies, and payoffs gained for the desired number of rounds and periods. The notebook also includes exploratory data analysis over the simulated output based on equilibrium, strategy frequencies, and payoffs.
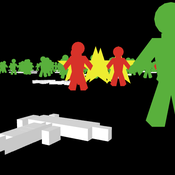
Peer reviewed NetLogo model of USA mass shootings
Smarzhevskiy Ivan | Published Tuesday, September 24, 2019 | Last modified Tuesday, April 14, 2020Is the mass shooter a maniac or a relatively normal person in a state of great stress? According to the FBI report (Silver, J., Simons, A., & Craun, S. (2018). A Study of the Pre-Attack Behaviors of Active Shooters in the United States Between 2000 – 2013. Federal Bureau of Investigation, U.S. Department of Justice,Washington, D.C. 20535.), only 25% of the active shooters were known to have been diagnosed by a mental health professional with a mental illness of any kind prior to the offense.
The main objects of the model are the humans and the guns. The main factors influencing behavior are the population size, the number of people with mental disabilities (“psycho” in the model terminology) per 100,000 population, the total number of weapons (“guns”) in the population, the availability of guns for humans, the intensity of stressors affecting humans and the threshold level of stress, upon reaching which a person commits an act of mass shooting.
The key difference (in the model) between a normal person and a psycho is that a psycho accumulates stressors and, upon reaching a threshold level, commits an act of mass shooting. A normal person is exposed to stressors, but reaching the threshold level for killing occurs only when the simultaneous effect of stressors on him exceeds this level.
The population dynamics are determined by the following factors: average (normally distributed) life expectancy (“life_span” attribute of humans) and population growth with the percentage of newborns set by the value of the TickReprRatio% slider of the current population volume from 16 to 45 years old.Thus, one step of model time corresponds to a year.
Peer reviewed DogPopDy: ABM for ABC planning
Aniruddha Belsare Abi Vanak | Published Saturday, August 01, 2020An agent-based model designed as a tool to assess and plan free-ranging dog population management programs that implement Animal Birth Control (ABC). The time, effort, financial resources and conditions needed to successfully control dog populations and achieve rabies control can be determined by performing virtual experiments using DogPopDy.
Sensitivity of a population submitted to floods to unknown upcoming floods and parameters of the dynamics
Sylvie Huet | Published Wednesday, September 22, 2021This work is a java implementation of a study of the viability of a population submitted to floods. The population derives some benefit from living in a certain environment. However, in this environment, floods can occur and cause damage. An individual protection measure can be adopted by those who wish and have the means to do so. The protection measure reduces the damage in case of a flood. However, the effectiveness of this measure deteriorates over time. Individual motivation to adopt this measure is boosted by the occurrence of a flood. Moreover, the public authorities can encourage the population to adopt this measure by carrying out information campaigns, but this comes at a cost. People’s decisions are modelled based on the Protection Motivation Theory (Rogers1975, Rogers 1997, Maddux1983) arguing that the motivation to protect themselves depends on their perception of risk, their capacity to cope with risk and their socio-demographic characteristics.
While the control designing proper informations campaigns to remain viable every time is computed in the work presented in https://www.comses.net/codebases/e5c17b1f-0121-4461-9ae2-919b6fe27cc4/releases/1.0.0/, the aim of the present work is to produce maps of probable viability in case the serie of upcoming floods is unknown as well as much of the parameters for the population dynamics. These maps are bi-dimensional, based on the value of known parameters: the current average wealth of the population and their actual or possible future annual revenues.
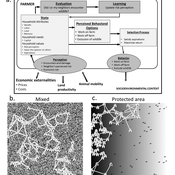
Wildlife-Human Interactions in Shared Landscapes (WHISL)
Andres Baeza-Castro Neil Carter Nicholas Magliocca | Published Friday, May 22, 2020This model simulates a group of farmers that have encounters with individuals of a wildlife population. Each farmer owns a set of cells that represent their farm. Each farmer must decide what cells inside their farm will be used to produce an agricultural good that is self in an external market at a given price. The farmer must decide to protect the farm from potential encounters with individuals of the wildlife population. This decision in the model is called “fencing”. Each time that a cell is fenced, the chances of a wildlife individual to move to that cell is reduced. Each encounter reduces the productive outcome obtained of the affected cell. Farmers, therefore, can reduce the risk of encounters by exclusion. The decision of excluding wildlife is made considering the perception of risk of encounters. In the model, the perception of risk is subjective, as it depends on past encounters and on the perception of risk from other farmers in the community. The community of farmers passes information about this risk perception through a social network. The user (observer) of the model can control the importance of the social network on the individual perception of risk.
Displaying 10 of 13 results for "Obi Thompson Sargoni" clear search