About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 6 of 6 results Traffic Simulation clear
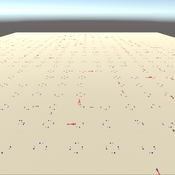
3D Urban Traffic Simulator (ABM) in Unity
Sedar Olmez Obi Thompson Sargoni Alison Heppenstall Daniel Birks Annabel Whipp Ed Manley | Published Friday, January 22, 2021 | Last modified Monday, March 22, 2021The Urban Traffic Simulator is an agent-based model developed in the Unity platform. The model allows the user to simulate several autonomous vehicles (AVs) and tune granular parameters such as vehicle downforce, adherence to speed limits, top speed in mph and mass. The model allows researchers to tune these parameters, run the simulator for a given period and export data from the model for analysis (an example is provided in Jupyter Notebook).
The data the model is currently able to output are the following:
…

Modelling an intersection with traffic signal countdown timer
Eduard | Published Thursday, May 19, 2022Developed as a part of a project in the University of Augsburg, Institute of Geography, it simulates the traffic in an intersection or junction which uses either regular traffic lights or traffic lights with a countdown timer. The model tracks the average speed of cars before and after traffic lights as well as the throughput.
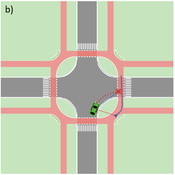
Agent-based Line-of-Sight Simulation for safer Crossings (Short Paper - Netlogo Model)
Vincent Franke | Published Thursday, August 05, 2021This software simulates cars and bicycles as traffic participants while crossing different crossroad designs such as roundabouts, protected crossroads and standard crossroads. It is written in Netlogo 6.2 and aims to identify safety characteristics of these layouts using agent-based modeling. Participants track the line of sight to each other and print them as an output alongside with the adjacent destination, used layout, count of collisions/cars/bicycles and time.
Detailed information can be found within the info tab of the program itself.
This model presents an autonomous, two-lane driving environment with a single lane-closure that can be toggled. The four driving scenarios - two baseline cases (based on the real-world) and two experimental setups - are as follows:
- Baseline-1 is where cars are not informed of the lane closure.
- Baseline-2 is where a Red Zone is marked wherein cars are informed of the lane closure ahead.
- Strategy-1 is where cars use a co-operative driving strategy - FAS. <sup>[1]</sup>
- Strategy-2 is a variant of Strategy-1 and uses comfortable deceleration values instead of the vehicle’s limit.
…
Evacuation of the city of Rouen using the GAMA advanced driving skill
Patrick Taillandier Guillaume Czura Pierrick Tranouez Eric Daudé | Published Thursday, April 25, 2019Model that illustrates the use of the GAMA advanced driving skill through a case study concerning the evacuation of the city of Rouen (France).

Eixample-MAS Traffic Simulation
Àlex Pardo Fernandez David Sánchez Pinsach | Published Tuesday, January 22, 2013 | Last modified Saturday, April 27, 2013This MAS simulates the traffic of Barcelona Eixample. Uses a centralized AI system in order to control the traffic lights. Car agents are reactive and have no awareness of the intelligence of the system. They (try to) avoid collisions.