About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 537 results for "Niklas Hase" clear search

Peer reviewed Zimbabwe Agro-Pastoral Management Model (ZAPMM): Musimboti wevanhu, zvipfuo nezvirimwa
MV Eitzel Solera Kleber Tulio Neves Jon Solera Kenneth B Wilson Abraham Mawere Ndlovu Aaron C Fisher André Veski Oluwasola E Omoju Emmanuel Mhike Hove | Published Tuesday, June 19, 2018This model has been created with and for the researcher-farmers of the Muonde Trust (http://www.muonde.org/), a registered Zimbabwean non-governmental organization dedicated to fostering indigenous innovation. Model behaviors and parameters (mashandiro nemisiyano nedzimwe model) derive from a combination of literature review and the collected datasets from Muonde’s long-term (over 30 years) community-based research. The goals of this model are three-fold (muzvikamu zvitatu):
A) To represent three components of a Zimbabwean agro-pastoral system (crops, woodland grazing area, and livestock) along with their key interactions and feedbacks and some of the human management decisions that may affect these components and their interactions.
B) To assess how climate variation (implemented in several different ways) and human management may affect the sustainability of the system as measured by the continued provisioning of crops, livestock, and woodland grazing area.
C) To provide a discussion tool for the community and local leaders to explore different management strategies for the agro-pastoral system (hwaro/nzira yekudyidzana kwavanhu, zvipfuo nezvirimwa), particularly in the face of climate change.
Peer reviewed BAMERS: Macroeconomic effect of extortion
Alejandro Platas López Alejandro Guerra-Hernández | Published Monday, March 23, 2020 | Last modified Sunday, July 26, 2020Inspired by the European project called GLODERS that thoroughly analyzed the dynamics of extortive systems, Bottom-up Adaptive Macroeconomics with Extortion (BAMERS) is a model to study the effect of extortion on macroeconomic aggregates through simulation. This methodology is adequate to cope with the scarce data associated to the hidden nature of extortion, which difficults analytical approaches. As a first approximation, a generic economy with healthy macroeconomics signals is modeled and validated, i.e., moderate inflation, as well as a reasonable unemployment rate are warranteed. Such economy is used to study the effect of extortion in such signals. It is worth mentioning that, as far as is known, there is no work that analyzes the effects of extortion on macroeconomic indicators from an agent-based perspective. Our results show that there is significant effects on some macroeconomics indicators, in particular, propensity to consume has a direct linear relationship with extortion, indicating that people become poorer, which impacts both the Gini Index and inflation. The GDP shows a marked contraction with the slightest presence of extortion in the economic system.
BEGET Classic
Kristin Crouse | Published Monday, November 11, 2019 | Last modified Monday, November 25, 2019BEGET Classic includes previous versions used in the classroom and for publication. Please check out the latest version of B3GET here, which has several user-friendly features such as directly importing and exporting genotype and population files.
The classic versions of B3GET include: version one and version three were used in undergraduate labs at the University of Minnesota to demonstrate principles in primate behavioral ecology; version two first demonstrated proof of concept for creating virtual biological organisms using decision-vector algorithms; version four was presented at the 2017 annual meeting at the American Association of Physical Anthropologists; version five was presented in a 2019 publication from the Journal of Human Evolution (Crouse, Miller, and Wilson, 2019).
RBM - A Relation-based model - a fishery implementation
Nanda Wijermans Maja Schlüter Anja Klein Tilman Hertz | Published Monday, March 17, 2025The Relation-Based Model (RBM) purpose is to operationalise (a form of) process-relational (PR) thinking to serve as a thinking tool for process-relational thinking among social-ecological system (SES) researchers. The development of this model itself has been a ‘Proof of concept’- exercise to see whether we actually represent process-relational thinking in a methodology that is entity-based (ABM).
The target of the agent-based model is to show the emergence, change and disappearance of fishing assemblages (focusing on processes of self-organisation) in a Mexican fishery using a process-relational view. From this view, a fishery is regarded as an assemblage in which fishing can be enabled, fishing can occur, and fish can be bought/sold. These core doings - or sub-assemblages or capacities - maintain the assemblage. Each (sub)assemblage reflects different actualisations of constellations of relations and elements (buyers, fishers, fuel, permits, vessels and wind). The RBM thereby reflects an artificial fishery in which agents (elements) and their links (relations) engage in (enabling) fishing and buying/selling.
Diffusion dynamics in small-world networks with heterogeneous consumers
Sebastiano Delre | Published Saturday, September 10, 2011 | Last modified Saturday, April 27, 2013This model simulates diffusion curves and it allows to test how social influence, network structure and consumer heterogeneity affect their spreads and their speeds.
A network agent-based model of ethnocentrism and intergroup cooperation
Ross Gore | Published Sunday, October 27, 2019We present a network agent-based model of ethnocentrism and intergroup cooperation in which agents from two groups (majority and minority) change their communality (feeling of group solidarity), cooperation strategy and social ties, depending on a barrier of “likeness” (affinity). Our purpose was to study the model’s capability for describing how the mechanisms of preexisting markers (or “tags”) that can work as cues for inducing in-group bias, imitation, and reaction to non-cooperating agents, lead to ethnocentrism or intergroup cooperation and influence the formation of the network of mixed ties between agents of different groups. We explored the model’s behavior via four experiments in which we studied the combined effects of “likeness,” relative size of the minority group, degree of connectivity of the social network, game difficulty (strength) and relative frequencies of strategy revision and structural adaptation. The parameters that have a stronger influence on the emerging dominant strategies and the formation of mixed ties in the social network are the group-tag barrier, the frequency with which agents react to adverse partners, and the game difficulty. The relative size of the minority group also plays a role in increasing the percentage of mixed ties in the social network. This is consistent with the intergroup ties being dependent on the “arena” of contact (with progressively stronger barriers from e.g. workmates to close relatives), and with measures that hinder intergroup contact also hindering mutual cooperation.
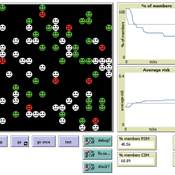
Risk-Sharing under Heterogeneity: NetLogo simulation
Eva Vriens | Published Monday, February 28, 2022Motivated by the emergence of new Peer-to-Peer insurance organizations that rethink how insurance is organized, we propose a theoretical model of decision-making in risk-sharing arrangements with risk heterogeneity and incomplete information about the risk distribution as core features. For these new, informal organisations, the available institutional solutions to heterogeneity (e.g., mandatory participation or price differentiation) are either impossible or undesirable. Hence, we need to understand the scope conditions under which individuals are motivated to participate in a bottom-up risk-sharing setting. The model puts forward participation as a utility maximizing alternative for agents with higher risk levels, who are more risk averse, are driven more by solidarity motives, and less susceptible to cost fluctuations. This basic micro-level model is used to simulate decision-making for agent populations in a dynamic, interdependent setting. Simulation results show that successful risk-sharing arrangements may work if participants are driven by motivations of solidarity or risk aversion, but this is less likely in populations more heterogeneous in risk, as the individual motivations can less often make up for the larger cost deficiencies. At the same time, more heterogeneous groups deal better with uncertainty and temporary cost fluctuations than more homogeneous populations do. In the latter, cascades following temporary peaks in support requests more often result in complete failure, while under full information about the risk distribution this would not have happened.

SimPioN - Simulating Path dependence in inter-organisational Networks
Nanda Wijermans Frithjof Stöppler | Published Monday, January 11, 2021The SimPioN model aims to abstractly reproduce and experiment with the conditions under which a path-dependent process may lead to a (structural) network lock-in in interorganisational networks.
Path dependence theory is constructed around a process argumentation regarding three main elements: a situation of (at least) initially non-ergodic (unpredictable with regard to outcome) starting conditions in a social setting; these become reinforced by the workings of (at least) one positive feedback mechanism that increasingly reduces the scope of conceivable alternative choices; and that process finally results in a situation of lock-in, where any alternatives outside the already adopted options become essentially impossible or too costly to pursue despite (ostensibly) better options theoretically being available.
The purpose of SimPioN is to advance our understanding of lock-ins arising in interorganisational networks based on the network dynamics involving the mechanism of social capital. This mechanism and the lock-ins it may drive have been shown above to produce problematic consequences for firms in terms of a loss of organisational autonomy and strategic flexibility, especially in high-tech knowledge-intensive industries that rely heavily on network organising.
…
Large-scale land acqusitions and smallholder food security
Tim Williams | Published Thursday, September 16, 2021Large-scale land acquisitions (LSLAs) threaten smallholder livelihoods globally. Despite more than a decade of research on the LSLA phenomenon, it remains a challenge to identify governance conditions that may foster beneficial outcomes for both smallholders and investors. One potentially promising strategy toward this end is contract farming (CF), which more directly involves smallholder households in commodity production than conditions of acquisition and displacement.
To improve understanding of how CF may mediate the outcomes of LSLAs, we developed an agent-based model of smallholder livelihoods, which we used as a virtual laboratory to experiment on a range of hypothetical LSLA and CF implementation scenarios.
The model represents a community of smallholder households in a mixed crop-livestock system. Each agent farms their own land and manages a herd of livestock. Agents can also engage in off-farm employment, for which they earn a fixed wage and compete for a limited number of jobs. The principal model outputs include measures of household food security (representing access to a single, staple food crop) and agricultural production (of a single, staple food crop).
…
SBH trust model
Di Wang | Published Tuesday, December 14, 2010 | Last modified Saturday, April 27, 2013This is a computational model to articulate the theory and test some assumption and axioms for the trust model and its relationship to SBH.
Displaying 10 of 537 results for "Niklas Hase" clear search