Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 508 results for "Tim M Daw" clear search
Informal risk-sharing cooperatives : ORP and Learning
Juliette Rouchier Victorien Barbet Renaud Bourlès | Published Monday, February 13, 2017 | Last modified Tuesday, May 16, 2023The model studies the dynamics of risk-sharing cooperatives among heterogeneous farmers. Based on their knowledge on their risk exposure and the performance of the cooperative farmers choose whether or not to remain in the risk-sharing agreement.
Impact of topography and climate change on Magdalenian social networks
Claudine Gravel-Miguel | Published Monday, September 11, 2017The model presented here was created as part of my dissertation. It aims to study the impacts of topography and climate change on prehistoric networks, with a focus on the Magdalenian, which is dated to between 20 and 14,000 years ago.
Hybrid Climate Assessment Model (HCAM)
Peer-Olaf Siebers | Published Friday, February 15, 2019Our Hybrid Climate Assessment Model (HCAM) aims to simulate the behaviours of individuals under the influence of climate change and external policy makings. In our proposed solution we use System Dynamics (SD) modelling to represent the physical and economic environments. Agent-Based (AB) modelling is used to represent collections of individuals that can interact with other collections of individuals and the environment. In turn, individual agents are endowed with an internal SD model to track their psychological state used for decision making. In this paper we address the feasibility of such a scalable hybrid approach as a proof-of-concept. This novel approach allows us to reuse existing rigid, but well-established Integrated Assessment Models (IAMs), and adds more flexibility by replacing aggregate stocks with a community of vibrant interacting entities.
Our illustrative example takes the settings of the U.S., a country that contributes to the majority of the global carbon footprints and that is the largest economic power in the world. The model considers the carbon emission dynamics of individual states and its relevant economic impacts on the nation over time.
Please note that the focus of the model is on a methodological advance rather than on applying it for predictive purposes! More details about the HCAM are provided in the forthcoming JASSS paper “An Innovative Approach to Multi-Method Integrated Assessment Modelling of Global Climate Change”, which is available upon request from the authors (contact [email protected]).
Telephone Game
Julia Kasmire | Published Friday, January 10, 2020This is a model of a game of Telephone (also known as Chinese Whishpers in the UK), with agents representing people that can be asked, to play. The first player selects a word from their internal vocabulary and “whispers” it to the next player, who may mishear it depending on the current noise level, who whispers that word to the next player, and so on.
When the game ends, the word chosen by the first player is compared to the word heard by the last player. If they match exactly, all players earn large prize. If the words do not match exactly, a small prize is awarded to all players for each part of the words that do match. Players change color to reflect their current prize-count. A histogram shows the distribution of colors over all the players.
The user can decide on factors like
* how many players there are,
…
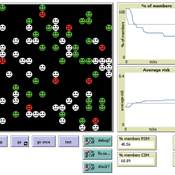
Risk-Sharing under Heterogeneity: NetLogo simulation
Eva Vriens | Published Monday, February 28, 2022Motivated by the emergence of new Peer-to-Peer insurance organizations that rethink how insurance is organized, we propose a theoretical model of decision-making in risk-sharing arrangements with risk heterogeneity and incomplete information about the risk distribution as core features. For these new, informal organisations, the available institutional solutions to heterogeneity (e.g., mandatory participation or price differentiation) are either impossible or undesirable. Hence, we need to understand the scope conditions under which individuals are motivated to participate in a bottom-up risk-sharing setting. The model puts forward participation as a utility maximizing alternative for agents with higher risk levels, who are more risk averse, are driven more by solidarity motives, and less susceptible to cost fluctuations. This basic micro-level model is used to simulate decision-making for agent populations in a dynamic, interdependent setting. Simulation results show that successful risk-sharing arrangements may work if participants are driven by motivations of solidarity or risk aversion, but this is less likely in populations more heterogeneous in risk, as the individual motivations can less often make up for the larger cost deficiencies. At the same time, more heterogeneous groups deal better with uncertainty and temporary cost fluctuations than more homogeneous populations do. In the latter, cascades following temporary peaks in support requests more often result in complete failure, while under full information about the risk distribution this would not have happened.

SimPioN - Simulating Path dependence in inter-organisational Networks
Nanda Wijermans Frithjof Stöppler | Published Monday, January 11, 2021The SimPioN model aims to abstractly reproduce and experiment with the conditions under which a path-dependent process may lead to a (structural) network lock-in in interorganisational networks.
Path dependence theory is constructed around a process argumentation regarding three main elements: a situation of (at least) initially non-ergodic (unpredictable with regard to outcome) starting conditions in a social setting; these become reinforced by the workings of (at least) one positive feedback mechanism that increasingly reduces the scope of conceivable alternative choices; and that process finally results in a situation of lock-in, where any alternatives outside the already adopted options become essentially impossible or too costly to pursue despite (ostensibly) better options theoretically being available.
The purpose of SimPioN is to advance our understanding of lock-ins arising in interorganisational networks based on the network dynamics involving the mechanism of social capital. This mechanism and the lock-ins it may drive have been shown above to produce problematic consequences for firms in terms of a loss of organisational autonomy and strategic flexibility, especially in high-tech knowledge-intensive industries that rely heavily on network organising.
…

Peer reviewed Agent-based model to simulate equilibria and regime shifts emerged in lake ecosystems
no contributors listed | Published Tuesday, January 25, 2022(An empty output folder named “NETLOGOexperiment” in the same location with the LAKEOBS_MIX.nlogo file is required before the model can be run properly)
The model is motivated by regime shifts (i.e. abrupt and persistent transition) revealed in the previous paleoecological study of Taibai Lake. The aim of this model is to improve a general understanding of the mechanism of emergent nonlinear shifts in complex systems. Prelimnary calibration and validation is done against survey data in MLYB lakes. Dynamic population changes of function groups can be simulated and observed on the Netlogo interface.
Main functional groups in lake ecosystems were modelled as super-individuals in a space where they interact with each other. They are phytoplankton, zooplankton, submerged macrophyte, planktivorous fish, herbivorous fish and piscivorous fish. The relationships between these functional groups include predation (e.g. zooplankton-phytoplankton), competition (phytoplankton-macrophyte) and protection (macrophyte-zooplankton). Each individual has properties in size, mass, energy, and age as physiological variables and reproduce or die according to predefined criteria. A system dynamic model was integrated to simulate external drivers.
Set biological and environmental parameters using the green sliders first. If the data of simulation are to be logged, set “Logdata” as true and input the name of the file you want the spreadsheet(.csv) to be called. You will need create an empty folder called “NETLOGOexperiment” in the same level and location with the LAKEOBS_MIX.nlogo file. Press “setup” to initialise the system and “go” to start life cycles.
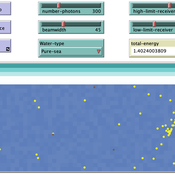
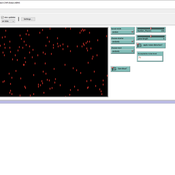
ABM for Underwater optical wireless communication in a water tank
Mohamed ABID | Published Sunday, May 29, 2022This model simulates the propagation of photons in a water tank. A source of light emits an impulse of photons with equal energy represented by yellow dots. These photons are then scattered by water particles before possibly reaching the photo-detector represented by a gray line. Different types of water are considered. For each one of them we calculate the total received energy.
The water tank is represented by a blue rectangle with fixed dimensions. It’s exposed to the air interface and has totally absorbent barriers. Four types of water are supported. Each one is characterized by its absorption and scattering coefficients.
At the source, the photons are generated uniformly with a random direction within the beamwidth. Each photon travels a random distance drawn from a distribution depending on the water characteristics before encountering a water particle.
Based on the updated position of the photon, three situations may occur:
-The photon hits the barrier of the tank on its trajectory. In this case it’s considered as lost since the barriers are assumed totally absorbent.
…
Informal Information Transmission Networks among Medieval Genoese Investors
Christopher Frantz | Published Wednesday, October 09, 2013 | Last modified Thursday, October 24, 2013This model represents informal information transmission networks among medieval Genoese investors used to inform each other about cheating merchants they employed as part of long-distance trade operations.
ForagerNet3_Demography_V3
Andrew White | Published Tuesday, November 29, 2016The ForagerNet3_Demography model is a non-spatial ABM designed to serve as a platform for exploring several aspects of hunter-gatherer demography.
Displaying 10 of 508 results for "Tim M Daw" clear search