About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 3 of 303 results for "J Hall" clear search
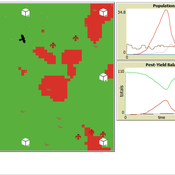
Peer reviewed Avian pest control: Yield outcome due to insectivorous birds, falconry, and integration of nest boxes.
David Jung | Published Monday, November 13, 2023 | Last modified Sunday, November 19, 2023The model aims to simulate predator-prey relationships in an agricultural setting. The focus lies on avian communities and their effect on different pest organisms (here: pest birds, rodents, and arthropod pests). Since most case studies focused on the impact on arthropod pests (AP) alone, this model attempts to include effects on yield outcome. By incorporating three treatments with different factor levels (insectivorous bird species, falconry, nest box density) an experimental setup is given that allows for further statistical analysis to identify an optimal combination of the treatments.
In light of a global decline of birds, insects, and many other groups of organisms, alternative practices of pest management are heavily needed to reduce the input of pesticides. Avian pest control therefore poses an opportunity to bridge the disconnect between humans and nature by realizing ecosystem services and emphasizing sustainable social ecological systems.
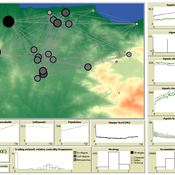
AncientS-ABM: Agent-Based Modeling of Past Societies Social Organization
Angelos Chliaoutakis | Published Thursday, April 09, 2020AncientS-ABM is an agent-based model for simulating and evaluating the potential social organization of an artificial past society, configured by available archaeological data. Unlike most existing agent-based models used in archaeology, our ABM framework includes completely autonomous, utility-based agents. It also incorporates different social organization paradigms, different decision-making processes, and also different cultivation technologies used in ancient societies. Equipped with such paradigms, the model allows us to explore the transition from a simple to a more complex society by focusing on the historical social dynamics; and to assess the influence of social organization on agents’ population growth, agent community numbers, sizes and distribution.
AncientS-ABM also blends ideas from evolutionary game theory with multi-agent systems’ self-organization. We model the evolution of social behaviours in a population of strategically interacting agents in repeated games where they exchange resources (utility) with others. The results of the games contribute to both the continuous re-organization of the social structure, and the progressive adoption of the most successful agent strategies. Agent population is not fixed, but fluctuates over time, while agents in stage games also receive non-static payoffs, in contrast to most games studied in the literature. To tackle this, we defined a novel formulation of the evolutionary dynamics via assessing agents’ rather than strategies’ fitness.
As a case study, we employ AncientS-ABM to evaluate the impact of the implemented social organization paradigms on an artificial Bronze Age “Minoan” society, located at different geographical parts of the island of Crete, Greece. Model parameter choices are based on archaeological evidence and studies, but are not biased towards any specific assumption. Results over a number of different simulation scenarios demonstrate better sustainability for settlements consisting of and adopting a socio-economic organization model based on self-organization, where a “heterarchical” social structure emerges. Results also demonstrate that successful agent societies adopt an evolutionary approach where cooperation is an emergent strategic behaviour. In simulation scenarios where the natural disaster module was enabled, we observe noticeable changes in the settlements’ distribution, relating to significantly higher migration rates immediately after the modeled Theran eruption. In addition, the initially cooperative behaviour is transformed to a non-cooperative one, thus providing support for archaeological theories suggesting that the volcanic eruption led to a clear breakdown of the Minoan socio-economic system.
…
3D Urban Traffic Simulator (ABM) in Unity
Sedar Olmez Obi Thompson Sargoni Alison Heppenstall Daniel Birks Annabel Whipp Ed Manley | Published Friday, January 22, 2021 | Last modified Monday, March 22, 2021The Urban Traffic Simulator is an agent-based model developed in the Unity platform. The model allows the user to simulate several autonomous vehicles (AVs) and tune granular parameters such as vehicle downforce, adherence to speed limits, top speed in mph and mass. The model allows researchers to tune these parameters, run the simulator for a given period and export data from the model for analysis (an example is provided in Jupyter Notebook).
The data the model is currently able to output are the following:
…
Displaying 3 of 303 results for "J Hall" clear search