About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 9 of 19 results for "Hallie Eakin" clear search
Managing ecological disturbances: Learning and the structure of social-ecological networks
Jacopo A. Baggio Vicken Hillis | Published Friday, March 03, 2017 | Last modified Thursday, August 02, 2018The aim of this model is to explore and understand the factors driving adoption of treatment strategies for ecological disturbances, considering payoff signals, learning strategies and social-ecological network structure
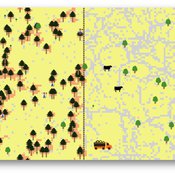
TRUE GRASP (Tree Recruitment Under Exotic GRAsses in a Savanna-Pineland)
is a socio-ecological agent-based model (ABM) and role playing game (RPG) for farmers and other stakeholders involved in rural landscape planning.
The purpose of this model is to allow actors to explore the individual and combined effects - as well as tradeoffs - of three methods of controlling exotic grasses in pine savannas: fire, weeding, and grazing cattle.
Design of TRUE GRASP is based on 3 years of socio-ecological fieldwork in a human-induced pine savanna in La Sepultura Biosphere Reserve (SBR) in the Mexican state of Chiapas. In this savanna, farmers harvest resin from Pinus oocarpa, which is used to produce turpentine and other products. However, long term persistence of this activity is jeopardized by low tree recruitment due to exotic tall grass cover in the forest understory (see Braasch et al., 2017). The TRUE GRASP model provides the user with different management strategies for controlling exotic grass cover and avoiding possible regime shifts, which in the case of the SBR would jeopardize resin harvesting.
Alpine land-use allocation model - ALUAM-AB
Simon Briner | Published Tuesday, January 31, 2012 | Last modified Saturday, April 27, 2013A model for simulating farmers and foresters response on changing climate and changing socio-economic parameters. Modeled are changes in land-use as well as in ecosystem services provision.
Adoption as a social marker
Paul Smaldino | Published Monday, October 17, 2016A model of innovation diffusion in a structured population with two groups who are averse to adopting a produce popular with the outgroup.

An Agent-Based Model of Flood Risk and Insurance
J Dubbelboer I Nikolic K Jenkins J Hall | Published Monday, July 27, 2015 | Last modified Monday, October 03, 2016A model to show the effects of flood risk on a housing market; the role of flood protection for risk reduction; the working of the existing public-private flood insurance partnership in the UK, and the proposed scheme ‘Flood Re’.
A model of the emergence of intersectional life course inequalities through transitions in the workplace. It explores LGBTQ citizens’ career outcomes and trajectories in relation to several mediating factors: (i) workplace discrimination; (ii) social capital; (iii) policy interventions (i.e., workplace equality, diversity, and inclusion policies); (iv) and LGBTQ employees’ behaviours in response to discrimination (i.e., moving workplaces and/or different strategies for managing the visibility of their identity).
Narragansett Bay (RI) Recreational Fishery ABM
Anne Innes-Gold Tyler Pavlowich Margaret Heinichen M. Conor McManus Jason McNamee Jeremy Collie Austin Humphries | Published Monday, June 21, 2021This model is based on the Narragansett Bay, RI recreational fishery. The two types of agents are piscivorous fish and fishers (shore and boat fishers are separate “breeds”). Each time step represents one week. Open season is weeks 1-26, assuming fishing occurs during half the year. At each weekly time step, fish agents grow, reproduce, and die. Fisher agents decide whether or not to fish based on their current satisfaction level, and those that do go fishing attempt to catch a fish. If they are successful, they decide whether to keep or release the fish. In our publication, this model was linked to an Ecopath with Ecosim food web model where the commercial harvest of forage fish affected the biomass of piscivorous fish - which then became the starting number of piscivorous fish for this ABM. The number of fish caught in a season of this ABM was converted to a fishing pressure and input back into the food web model.
An Opinion Dynamics of Science? Agent-Based Modeling of Knowledge Spread
Bernardo Buarque | Published Thursday, April 13, 2023We present a socio-epistemic model of science inspired by the existing literature on opinion dynamics. In this model, we embed the agents (or scientists) into social networks - e.g., we link those who work in the same institutions. And we place them into a regular lattice - each representing a unique mental model. Thus, the global environment describes networks of concepts connected based on their similarity. For instance, we may interpret the neighbor lattices as two equivalent models, except one does not include a causal path between two variables.
Agents interact with one another and move across the epistemic lattices. In other words, we allow the agents to explore or travel across the mental models. However, we constrain their movements based on absorptive capacity and cognitive coherence. Namely, in each round, an agent picks a focal point - e.g., one of their colleagues - and will move towards it. But the agents’ ability to move and speed depends on how far apart they are from the focal point - and if their new position is cognitive/logic consistent.
Therefore, we propose an analytical model that examines the connection between agents’ accumulated knowledge, social learning, and the span of attitudes towards mental models in an artificial society. While we rely on the example from the General Theory of Relativity renaissance, our goal is to observe what determines the creation and diffusion of mental models. We offer quantitative and inductive research, which collects data from an artificial environment to elaborate generalized theories about the evolution of science.
3D Urban Traffic Simulator (ABM) in Unity
Sedar Olmez Obi Thompson Sargoni Alison Heppenstall Daniel Birks Annabel Whipp Ed Manley | Published Friday, January 22, 2021 | Last modified Monday, March 22, 2021The Urban Traffic Simulator is an agent-based model developed in the Unity platform. The model allows the user to simulate several autonomous vehicles (AVs) and tune granular parameters such as vehicle downforce, adherence to speed limits, top speed in mph and mass. The model allows researchers to tune these parameters, run the simulator for a given period and export data from the model for analysis (an example is provided in Jupyter Notebook).
The data the model is currently able to output are the following:
…
Displaying 9 of 19 results for "Hallie Eakin" clear search