About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 19 results for "Angel Sánchez" clear search
Peer reviewed Agent-Based Insight into Eco-Choices: Simulating the Fast Fashion Shift
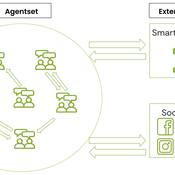
Daria Soboleva Angel Sánchez | Published Wednesday, August 07, 2024The present model was created and used for the study titled ``Agent-Based Insight into Eco-Choices: Simulating the Fast Fashion Shift.” The model is implemented in the multi-agent programmable environment NetLogo 6.3.0. The model is designed to simulate the behavior and decision-making processes of individuals (agents) in a social network. It focuses on how agents interact with their peers, social media, and government campaigns, specifically regarding their likelihood to purchase fast fashion.
Gossip and competitive altruism support cooperation in a Public Good Game
danielevilone | Published Friday, April 16, 2021Here we share the raw results of the social experiments of the paper “Gossip and competitive altruism support cooperation in a Public Good Game” by Giardini, Vilone, Sánchez, Antonioni, under review for Philosophical Transactions B. The experiment is thoroughly described there, in the following we summarize the main features of the experimental setup. The authors are available for further clarifications if requested.
Participants were recruited from the LINEEX subjects pool (University of Valencia Experimental Economics lab). 160 participants mean age = 21.7 years; 89 female) took part in this study in return for a flat payment of 5 EUR and the opportunity to earn an additional payment ranging from 8 to 16 EUR (mean total payment = 17.5 EUR). 80 subjects, divided into 5 groups of 16, took part in the competitive treatment while other 80 subjects participated in the non-competitive treatment. Laboratory experiments were conducted at LINEEX on September 16th and 17th, 2015.
ABM for Underwater optical wireless communication in a water tank
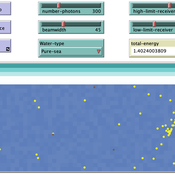
Mohamed ABID | Published Sunday, May 29, 2022This model simulates the propagation of photons in a water tank. A source of light emits an impulse of photons with equal energy represented by yellow dots. These photons are then scattered by water particles before possibly reaching the photo-detector represented by a gray line. Different types of water are considered. For each one of them we calculate the total received energy.
The water tank is represented by a blue rectangle with fixed dimensions. It’s exposed to the air interface and has totally absorbent barriers. Four types of water are supported. Each one is characterized by its absorption and scattering coefficients.
At the source, the photons are generated uniformly with a random direction within the beamwidth. Each photon travels a random distance drawn from a distribution depending on the water characteristics before encountering a water particle.
Based on the updated position of the photon, three situations may occur:
-The photon hits the barrier of the tank on its trajectory. In this case it’s considered as lost since the barriers are assumed totally absorbent.
…
Peer reviewed Axelrod_Cultural_Dissemination
Arezky Hernández | Published Wednesday, March 27, 2013 | Last modified Sunday, May 05, 2013The Axelrod’s model of cultural dissemination is an agent-model designed to investigate the dissemination of culture among interacting agents on a society.
Non-attentional visual information transmission in groups under predation
J. Fransje Weerden, van | Published Wednesday, March 25, 2020Our aim is to show effects of group living when only low-level cognition is assumed, such as pattern recognition needed for normal functioning, without assuming individuals have knowledge about others around them or warn them actively.
The model is of a group of vigilant foragers staying within a patch, under attack by a predator. The foragers use attentional scanning for predator detection, and flee after detection. This fleeing action constitutes a visual cue to danger, and can be received non-attentionally by others if it occurs within their limited visual field. The focus of this model is on the effectiveness of this non-attentional visual information reception.
A blind angle obstructing cue reception caused by behaviour can exist in front, morphology causes a blind angle in the back. These limitations are represented by two visual field shapes. The scan for predators is all-around, with distance-dependent detection; reception of flight cues is limited by visual field shape.
Initial parameters for instance: group sizes, movement, vision characteristics for predator detection and for cue reception. Captures (failure), number of times the information reached all individuals at the same time (All-fled, success), and several other effects of the visual settings are recorded.
Stoplight parrotfish population model
Tyler Pavlowich | Published Monday, April 02, 2018This agent-based model simulates a stoplight parrotfish population in a heavily-fished Caribbean coral reef. The model allows for the simulation of various fishing regulations and observation of population and catch outcomes. It was built using the structure and equations from several previously published models, including the work of Bozec et al. (2016) and Alonzo and Mangel (2004 and 2005). The initial model conditions are parameterized to population and fishing data collected in Buen Hombre, Dominican Republic by Tyler Pavlowich.
Modeling financial networks based on interpersonal trust
Anna Klabunde Michael Roos | Published Wednesday, May 29, 2013 | Last modified Thursday, November 28, 2013We build a stylized model of a network of business angel investors and start-up entrepreneurs. Decisions are based on trust as a decision making tool under true uncertainty.

Eixample-MAS Traffic Simulation
Àlex Pardo Fernandez David Sánchez Pinsach | Published Tuesday, January 22, 2013 | Last modified Saturday, April 27, 2013This MAS simulates the traffic of Barcelona Eixample. Uses a centralized AI system in order to control the traffic lights. Car agents are reactive and have no awareness of the intelligence of the system. They (try to) avoid collisions.
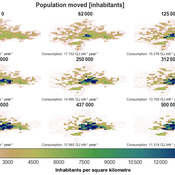
IUCM - The Integrated Urban Complexity Model
Roger Cremades Philipp S. Sommer | Published Thursday, December 14, 2023We present the Integrated Urban Complexity model (IUCm 1.0) that computes “climate-smart urban forms”, which are able to cut emissions related to energy consumption from urban mobility in half. Furthermore, we show the complex features that go beyond the normal debates about urban sprawl vs. compactness. Our results show how to reinforce fractal hierarchies and population density clusters within climate risk constraints to significantly decrease the energy consumption of urban mobility. The new model that we present aims to produce new advice about how cities can combat climate change. From a technical angle, this model is a geographical automaton, conceptually interfacing between cellular automata and spatial explicit optimisation to achieve normative sustainability goals related to low energy. See a complete user guide at https://iucm.readthedocs.io/en/latest/ .
Peer reviewed Correlated Random Walk (NetLogo)
Viktoriia Radchuk Thibault Fronville Uta Berger | Published Tuesday, May 09, 2023 | Last modified Monday, December 18, 2023This is NetLogo code that presents two alternative implementations of Correlated Random Walk (CRW):
- 1. drawing the turning angles from the uniform distribution, i.e. drawing the angle with the same probability from a certain given range;
- 2. drawing the turning angles from von Mises distribution.
The move lengths are drawn from the lognormal distribution with the specified parameters.
Correlated Random Walk is used to represent the movement of animal individuals in two-dimensional space. When modeled as CRW, the direction of movement at any time step is correlated with the direction of movement at the previous time step. Although originally used to describe the movement of insects, CRW was later shown to sufficiently well describe the empirical movement data of other animals, such as wild boars, caribous, sea stars.
…
Displaying 10 of 19 results for "Angel Sánchez" clear search