About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 205 results for "Martin Loidl" clear search
Urban waterlogging disaster evaluation based on complex network a case study of Zhengzhou, China
Jia Xu Chao Ding | Published Monday, April 17, 2023The model constructs a complex network of traffic based on the main urban area of Zhengzhou, China, and simulates the urban rainfall process using the ABM model to analyse the real-time risk of flooding hazards in the nodes of the complex network.
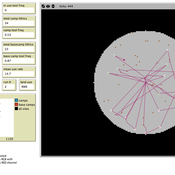
Modeling information Asymmetries in Tourism
Rodolfo Baggio Jacopo A. Baggio | Published Monday, January 09, 2012 | Last modified Saturday, April 27, 2013A very simple model elaborated to explore what may happens when buyers (travelers) have more information than sellers (tourist destinations)
Animal territory formation (Reusable Building Block RBB)
Robert Zakrzewski Stephanie Kramer-Schadt Volker Grimm | Published Sunday, November 12, 2023This is a generic sub-model of animal territory formation. It is meant to be a reusable building block, but not in the plug-and-play sense, as amendments are likely to be needed depending on the species and region. The sub-model comprises a grid of cells, reprenting the landscape. Each cell has a “quality” value, which quantifies the amount of resources provided for a territory owner, for example a tiger. “Quality” could be prey density, shelter, or just space. Animals are located randomly in the landscape and add grid cells to their intial cell until the sum of the quality of all their cells meets their needs. If a potential new cell to be added is owned by another animal, competition takes place. The quality values are static, and the model does not include demography, i.e. mortality, mating, reproduction. Also, movement within a territory is not represented.
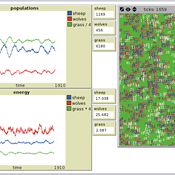
Peer reviewed PPHPC - Predator-Prey for High-Performance Computing
Nuno Fachada | Published Saturday, August 08, 2015 | Last modified Wednesday, November 25, 2015PPHPC is a conceptual model for studying and evaluating implementation strategies for spatial agent-based models (SABMs). It is a realization of a predator-prey dynamic system, and captures important SABMs characteristics.
Do microfinance institutes help slum-dwellers in coping with frequent disasters? An Agent-Based Modelling study
Mitali Yeshwant Yeshwant Joshi | Published Friday, March 13, 2020The model aims to investigate the role of Microfinance Institutes (MFIs) in strengthening the coping capacity of slum-dwellers (residents) in case of frequent disasters. The main purpose of the model is system understanding. It aids in understanding the following research question: Are the microcredits provided by MFI to start a small business helpful in increasing coping capacity of a slum dweller for recovering from frequent and intense disasters?
Retention in Higher Education: An Agent-Based Model of Social Interactions and Motivated Agent Behavior
Amira Al-Khulaidy Stine Andrew Crooks | Published Wednesday, October 23, 2024Educational attainment and student retention in higher education are two of the main focuses of higher education research. Institutions in the U.S. are constantly looking for ways to identify areas of improvement across different aspects of the student experience on university campuses. This paper combines Department of Education data, U.S. Census data, and higher education theory on student retention, to build an agent-based model of student behavior.
Formation of Lithic Assemblages v. 1
C Michael Barton Julien Riel-Salvatore | Published Thursday, September 04, 2014This model represents technological and ecological behaviors of mobile hunter-gatherers, in a variable environment, as they produce, use, and discard chipped stone artifacts. The results can be analyzed and compared with archaeological sites.
A multithreaded PPHPC replication in Java
Nuno Fachada | Published Saturday, October 31, 2015 | Last modified Tuesday, January 19, 2016A multithreaded replication of the PPHPC model in Java for testing different ABM parallelization strategies.
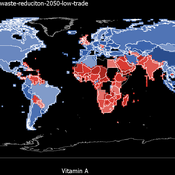
FeedUS - A global food trade model
Jiaqi Ge | Published Thursday, February 25, 2021 | Last modified Friday, February 26, 2021The purpose of the model is to study the impact of global food trade on food and nutrition security in countries around the world. It will incorporate three main aspects of trade between countries, including a country’s wealth, geographic location, and its trade relationships with other countries (past and ongoing), and can be used to study food and nutrition security across countries in various scenarios, such as climate change, sustainable intensification, waste reduction and dietary change.
AgriAdopt
Sebastian Rasch | Published Tuesday, March 26, 2024The purpose of this model is to project the dynamics of technology adoption of autonomous weeding robots by sugar beet producing farmers in North Rhine-Westphalia (NRW). Moreover, the design of the model serves the purpose to investigate second-order effects of robot adoption on shifts in farm income and on production quantities of main crops produced in North Rhine-Westphalia. One aim is to analyse the impact of technology attributes and costs of pesticides on adoption patterns.
Displaying 10 of 205 results for "Martin Loidl" clear search