About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 127 results for "José I Santos" clear search
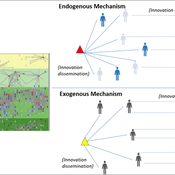
Peer reviewed Modelling Agricultural Innovations as a Social-Ecological Phenomenon
Udita Sanga Maja Schlüter | Published Thursday, November 17, 2022The goal of the AG-Innovation agent-based model is to explore and compare the effects of two alternative mechanisms of innovation development and diffusion (exogenous, linear and endogenous, non-linear) on emergent properties of food and income distribution and adoption rates of different innovations. The model also assesses the range of conditions under which these two alternative mechanisms would be effective in improving food security and income inequality outcomes. Our modelling questions were: i) How do cross-scalar social-ecological interactions within agricultural innovation systems affect system outcomes of food security and income inequality? ii) Do foreign aid-driven exogenous innovation perpetuate income inequality and food insecurity and if so, under which conditions? iii) Do community-driven endogenous innovations improve food security and income inequality and if so, under which conditions? The Ag-Innovation model is intended to serve as a thinking tool for for the development and testing of hypotheses, generating an understanding of the behavior of agricultural innovation systems, and identifying conditions under which alternated innovation mechanisms would improve food security and income inequality outcomes.

Societal Simulator v203
Tim Gooding | Published Tuesday, October 01, 2013 | Last modified Friday, November 28, 2014Designed to capture the evolutionary forces of global society.
Model of a Socioterritorial complex system - The Southern Rural Territory of Sergipe
Marcos Aurélio Santos da Silva | Published Friday, May 18, 2018The model represents a set of social actors engaged into a collegiate (composed of representants of civil society and public sector) to manage the Southern Rural Territory of Sergipe (SRTS), created by two territorial public policies, the National Program for the Sustainable Development of Rural Territories (PRONAT) and the Program Territories of Citizenship (PTC) which aim at balancing power relations between social actors of Rural Territories. The main gola of these public policies is to empower the civil society engaged in the territory to enable them to negotiate with the traditional power (mainly majors). It was designed two models of the SRTS, one that represents the situation in 2012, and other that represents the social interdependencies in 2017. For each period it is possible to measure the capability and power of each modeled social actor and see whether it is observed the empowerment of the civil society or not.
Stylized Spatial-Social Subsystem based on Luhmann's theory (S4Luhmann)
Marcos Aurélio Santos da Silva | Published Saturday, April 06, 2019The model proposes a translation of some Luhmann’s concepts (social sub-system, perturbation, dissipation, social communication and power) into a model using a stylized spatial-society as a metaphor of a Luhmann’s social subsystem. The model has been used to improve the social theory understanding and to evaluate the effect of different parameterization in the global stabilization and individual/social power distribution.
Models for assessing empowerment through public policies in rural areas in Brazil
Marcos Aurélio Santos da Silva | Published Monday, April 08, 2019Brazil has initiated two territorial public policies for a rural sustainable development, the National Program for Sustainable Development of the Rural Territories (PRONAT) and Citizenship Territory Program (PTC). These public policies aims, as a condition for its effectiveness, the equilibrium of the power relations between actors which participate in the Collegiate for Territorial Development (CODETER) of each Rural Territory. Our research studies the hypotheses that, in the Rural Territories submitted to the PRONAT and PTC public policies, the power and reciprocity relations between actors engaged in the CODETER effectively have evolved in favor of the civil society representatives to the detriment of the public powers, notably the mayors.
The SocLab approach has been applied in two case studies and four models representing the Southern Rural Territory of Sergipe (TRSS) and the São Francisco Rural Territory (TRBSF) were designed for two referential periods, 2008-2012 and 2013-2017. These models were developed to evaluate the empowerment of the civil society in these rural territories due to thes two public policies, PRONAT and PTC.
EU language skills
Marco Civico | Published Sunday, July 07, 2024The objective of this agent-based model is to test different language education orientations and their consequences for the EU population in terms of linguistic disenfranchisement, that is, the inability of citizens to understand EU documents and parliamentary discussions should their native language(s) no longer be official. I will focus on the impact of linguistic distance and language learning. Ideally, this model would be a tool to help EU policy makers make informed decisions about language practices and education policies, taking into account their consequences in terms of diversity and linguistic disenfranchisement. The model can be used to force agents to make certain choices in terms of language skills acquisition. The user can then go on to compare different scenarios in which language skills are acquired according to different rationales. The idea is that, by forcing agents to adopt certain language learning strategies, the model user can simulate policies promoting the acquisition of language skills and get an idea of their impact. In this way the model allows not only to sketch various scenarios of the evolution of language skills among EU citizens, but also to estimate the level of disenfranchisement in each of these scenarios.
A preliminary extension of the Hemelrijk 1996 model of reciprocal behavior to include feeding
Sean Barton | Published Monday, December 13, 2010 | Last modified Saturday, April 27, 2013A more complete description of the model can be found in Appendix I as an ODD protocol. This model is an expansion of the Hemelrijk (1996) that was expanded to include a simple food seeking behavior.
ADAM: Agent-based Demand and Assignment Model
D Levinson | Published Monday, August 29, 2011 | Last modified Saturday, April 27, 2013The core algorithm is an agent-based model, which simulates travel patterns on a network based on microscopic decision-making by each traveler.
Walk Away in groups
Athena Aktipis | Published Thursday, March 17, 2016This NetLogo model implements the Walk Away strategy in a spatial public goods game, where individuals have the ability to leave groups with insufficient levels of cooperation.

Peer reviewed NoD-Neg: A Non-Deterministic model of affordable housing Negotiations
Aya Badawy Richard Kingston Nuno Pinto | Published Sunday, September 08, 2024The Non-Deterministic model of affordable housing Negotiations (NoD-Neg) is designed for generating hypotheses about the possible outcomes of negotiating affordable housing obligations in new developments in England. By outcomes we mean, the probabilities of failing the negotiation and/or the different possibilities of agreement.
The model focuses on two negotiations which are key in the provision of affordable housing. The first is between a developer (DEV) who is submitting a planning application for approval and the relevant Local Planning Authority (LPA) who is responsible for reviewing the application and enforcing the affordable housing obligations. The second negotiation is between the developer and a Registered Social Landlord (RSL) who buys the affordable units from the developer and rents them out. They can negotiate the price of selling the affordable units to the RSL.
The model runs the two negotiations on the same development project several times to enable agents representing stakeholders to apply different negotiation tactics (different agendas and concession-making tactics), hence, explore the different possibilities of outcomes.
The model produces three types of outputs: (i) histograms showing the distribution of the negotiation outcomes in all the simulation runs and the probability of each outcome; (ii) a data file with the exact values shown in the histograms; and (iii) a conversation log detailing the exchange of messages between agents in each simulation run.
Displaying 10 of 127 results for "José I Santos" clear search