About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 1069 results for "A Flache" clear search
PaCE Austria Pilot Model
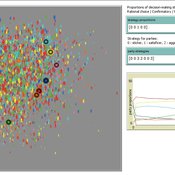
Ruth Meyer | Published Tuesday, June 30, 2020The objective of building a social simulation in the Populism and Civic Engagement (PaCE) project is to study the phenomenon of populism by mapping individual level political behaviour and explain the influence of agents on, and their interdependence with the respective political parties. Voters, political parties and – to some extent – the media can be viewed as forming a complex adaptive system, in which parties compete for citizens’ votes, voters decide on which party to vote for based on their respective positions with regard to particular issues, and the media may influence the salience of issues in the public debate.
This is the first version of a model exploring voting behaviour in Austria. It focusses on modelling the interaction of voters and parties in a political landscape; the effects of the media are not yet represented. Austria was chosen as a case study because it has an established populist party (the “Freedom Party” FPO), which has even been part of the government over the years.
Household Energy Retrofit Behavior (HERB) ABM
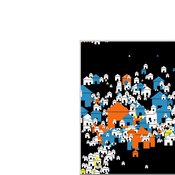
Lars Even Egner | Published Thursday, October 20, 2022The HERB model simulates the retrofit behavior of homeowners in a neighborhood. The model initially parameterizes a neighborhood and households with technical factors such as energy standard, the availability of subsidies, and neighbors’ retrofit activity. Then, these factors are translated into psychological variables such as perceived comfort gain, worry about affording the retrofit, and perceiving the current energy standard of the home as wasteful. These psychological variables moderate the transition between four different stages of deciding to retrofit, as suggested by a behavioral model specific to household energy retrofitting identified based on a large population survey in Norway. The transition between all stages eventually leads to retrofitting, which affects both the household’s technical factors and friends and neighbors, bringing the model “full circle”. The model assumes that the energy standard of the buildings deteriorates over time, forcing households to retrofit regularly to maintain a certain energy standard.
Because experiment datafiles are about 15GB, they are available at https://doi.org/10.18710/XOSAMD
This paper presents an agent-based model to study the dynamics of city-state systems in a constrained environment with limited space and resources. The model comprises three types of agents: city-states, villages, and battalions, where city-states, the primary decision-makers, can build villages for food production and recruit battalions for defense and aggression. In this setting, simulation results, generated through a multi-parameter grid sampling, suggest that risk-seeking strategies are more effective in high-cost scenarios, provided that the production rate is sufficiently high. Also, the model highlights the role of output productivity in defining which strategic preferences are successful in a long-term scenario, with higher outputs supporting more aggressive expansion and military actions, while resource limitations compel more conservative strategies focused on survival and resource conservation. Finally, the results suggest the existence of a non-linear effect of diminishing returns in strategic investments on successful strategies, emphasizing the need for careful resource allocation in a competitive environment.
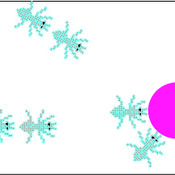
Linear recruitment leads to allocation and flexibility in collective foraging by ants
Takao Sasaki Zachary Joseph Shaffer Stephen Pratt | Published Thursday, July 11, 2013 | Last modified Thursday, September 05, 2013Ants in the genus Temnothorax use tandem runs (rather than pheromone trails) to recruit to food sources. This model explores the collective consequences of this linear recruitment (as opposed to highly nonlinear pheromone trails).
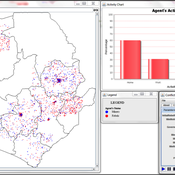
The Geography of Conflict Diamonds: The Case of Sierra Leone
Andrew Crooks Bianica Pires | Published Thursday, March 24, 2016 | Last modified Thursday, March 24, 2016Using Sierra Leone as a test case, the purpose of the model is to explore the role of geography in a resource-driven war. An ABM is integrated with geographic information systems (GIS) for this purpose.
Lake Anderson Revisited II
Klaus G. Troitzsch | Published Monday, June 28, 2021The purpose of this study is another agent-based replication of a System Dynamics model (Anderson,1973) where he analysed the dynamics of nutrient, biomass, oxygen and detritus in a model lake under conditions of artificial fertilising and policies to deal with the consequences of artificial fertilising.. A first replication (Möhring & Troitzsch,2001) added those agents to the original model that were necessary to move the role of the experimenter into the model, whereas this replication replaces the original lake with a collection of small elements between which biomass, nurtrents and oxygen are exchanged, adds rivers upstream and downstream as well as adjacent land divided into villages and populated with farms and industrial plants run by individual persons.
Network Behaviour Diffusion
Jennifer Badham | Published Saturday, October 02, 2021This model implements two types of network diffusion from an initial group of activated nodes. In complex contagion, a node is activated if the proportion of neighbour nodes that are already activated exceeds a given threshold. This is intended to represented the spread of health behaviours. In simple contagion, an activated node has a given probability of activating its inactive neighbours and re-tests each time step until all of the neighbours are activated. This is intended to represent information spread.
A range of networks are included with the model from secondary school friendship networks. The proportion of nodes initially activated and the method of selecting those nodes are controlled by the user.
Simulating Social Interaction in Times of COVID Restrictions
Oscar de Vries | Published Friday, November 17, 2023Social distancing is a strategy to mitigate the spread of contagious disease, but it bears negative impacts on people’s social well-being, resulting in non-compliance. This paper uses an integrated behavioral simulation model, called HUMAT, to identify a sweet spot
that balances strictness of and obedience to social distancing rules.
A novel agent-based model was developed that aims to explore social interaction while it is constrained by visitor limitations (due to Dutch COVID measures). Specifically, the model aims to capture the interaction between the need for social contact and the support for the visitors measure. The model was developed using the HUMAT integrated framework, which offered a psychological and sociological foundation for the behavior of the agents.
Peer reviewed lgm_ecodynamics
Colin Wren | Published Monday, April 22, 2019This is a modification of a model published previous by Barton and Riel-Salvatore (2012). In this model, we simulate six regional populations within Last Glacial Maximum western Europe. Agents interact through reproduction and genetic markers attached to each of six regions mix through subsequent generations as a way to track population dynamics, mobility, and gene flow. In addition, the landscape is heterogeneous and affects agent mobility and, under certain scenarios, their odds of survival.

Peer reviewed MGA - Minimal Genetic Algorithm
Cosimo Leuci | Published Tuesday, September 03, 2019 | Last modified Thursday, January 30, 2020Genetic algorithms try to solve a computational problem following some principles of organic evolution. This model has educational purposes; it can give us an answer to the simple arithmetic problem on how to find the highest natural number composed by a given number of digits. We approach the task using a genetic algorithm, where the candidate solutions to the problem are represented by agents, that in logo programming environment are usually known as “turtles”.
Displaying 10 of 1069 results for "A Flache" clear search