About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 537 results for "Niklas Hase" clear search
DARTS: an agent-based model of the global food system for studying its resilience to shocks
Hubert Fonteijn | Published Wednesday, November 22, 2023DARTS simulates food systems in which agents produce, consume and trade food. Here, food is a summary item that roughly corresponds to commodity food types (e.g. rice). No other food types are taken into account. Each food system (World) consists of its own distribution of agents, regions and connections between agents. Agents differ in their ability to produce food, earn off-farm income and trade food. The agents aim to satisfy their food requirements (which are fixed and equal across agents) by either their own food production or by food purchases. Each simulation step represents one month, in which agents can produce (if they have productive capacity and it is a harvest month for their region), earn off-farm income, trade food (both buy and sell) and consume food. We evaluate the performance of the food system by averaging the agents’ food satisfaction, which is defined as the ratio of the food consumed by each agent at the end of each month divided by her food requirement. At each step, any of the abovementioned attributes related to the agents’ ability to satisfy their food requirement can (temporarily) be shocked. These shocks include reducing the amount of food they produce, removing their ability to trade locally or internationally and reducing their cash savings. Food satisfaction is quantified (both immediately after the shock and in the year following the shock) to evaluate food security of a particular food system, both at the level of agent types (e.g. the urban poor and the rural poor) and at the systems level. Thus, the effects of shocks on food security can be related to the food system’s structure.
Interactions between organizations and social networks in common-pool resource governance
Phesi Project | Published Monday, October 29, 2012 | Last modified Saturday, April 27, 2013Explores how social networks affect implementation of institutional rules in a common pool resource.
Adoption as a social marker
Paul Smaldino | Published Monday, October 17, 2016A model of innovation diffusion in a structured population with two groups who are averse to adopting a produce popular with the outgroup.
Peer reviewed Simulating the Economic Impact of Boko Haram on a Cameroonian Floodplain
Mark Moritz Nathaniel Henry Sarah Laborde | Published Saturday, October 22, 2016 | Last modified Wednesday, June 07, 2017This model examines the potential impact of market collapse on the economy and demography of fishing households in the Logone Floodplain, Cameroon.
06 EiLab V1.36 – Entropic Index Laboratory
Garvin Boyle | Published Saturday, January 31, 2015 | Last modified Friday, April 14, 2017EiLab explores the role of entropy in simple economic models. EiLab is one of several models exploring the dynamics of sustainable economics – PSoup, ModEco, EiLab, OamLab, MppLab, TpLab, and CmLab.
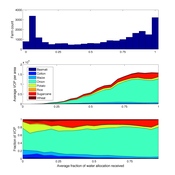
Irrigation Equity and Efficiency
Andrew Bell | Published Tuesday, August 30, 2016The purpose of this model is to examine equity and efficiency in crop production across a system of irrigated farms, as a function of maintenance costs, assessed water fees, and the capacity of farmers to trade water rights among themselves.
COOPER - Flood impacts over Cooperative Winemaking Systems
David Nortes Martinez David Nortes-Martinez | Published Thursday, February 08, 2018 | Last modified Friday, March 22, 2019The model simulates flood damages and its propagation through a cooperative, productive, farming system, characterized as a star-type network, where all elements in the system are connected one to each other through a central element.
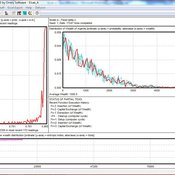
06 EiLab V1.40 – Entropic Index Laboratory
Garvin Boyle | Published Monday, March 19, 2018There is a new type of economic model called a capital exchange model, in which the biophysical economy is abstracted away, and the interaction of units of money is studied. Benatti, Drăgulescu and Yakovenko described at least eight capital exchange models – now referred to collectively as the BDY models – which are replicated as models A through H in EiLab. In recent writings, Yakovenko goes on to show that the entropy of these monetarily isolated systems rises to a maximal possible value as the model approaches steady state, and remains there, in analogy of the 2nd law of thermodynamics. EiLab demonstrates this behaviour. However, it must be noted that we are NOT talking about thermodynamic entropy. Heat is not being modeled – only simple exchanges of cash. But the same statistical formulae apply.
In three unpublished papers and a collection of diary notes and conference presentations (all available with this model), the concept of “entropic index” is defined for use in agent-based models (ABMs), with a particular interest in sustainable economics. Models I and J of EiLab are variations of the BDY model especially designed to study the Maximum Entropy Principle (MEP – model I) and the Maximum Entropy Production Principle (MEPP – model J) in ABMs. Both the MEPP and H.T. Odum’s Maximum Power Principle (MPP) have been proposed as organizing principles for complex adaptive systems. The MEPP and the MPP are two sides of the same coin, and an understanding of their implications is key, I believe, to understanding economic sustainability. Both of these proposed (and not widely accepted) principles describe the role of entropy in non-isolated systems in which complexity is generated and flourishes, such as ecosystems, and economies.
EiLab is one of several models exploring the dynamics of sustainable economics – PSoup, ModEco, EiLab, OamLab, MppLab, TpLab, and CmLab.
Contract farming in the Mekong Delta's rice supply chain
Hung Nguyen | Published Tuesday, February 05, 2019We study three obstacles of the expansion of contract rice farming in the Mekong Delta (MKD) region. The failure of buyers in building trust-based relationship with small-holder farmers, unattractive offered prices from the contract farming scheme, and limited rice processing capacity have constrained contractors from participating in the large-scale paddy field program. We present an agent-based model to examine the viability of contract farming in the region from the contractor perspective.
The model focuses on financial incentives and trust, which affect the decision of relevant parties on whether to participate and honor a contract. The model is also designed in the context of the MKD’s rice supply chain with two contractors engaging in the contract rice farming scheme alongside an open market, in which both parties can renege on the agreement. We then evaluate the contractors’ performances with different combinations of scenarios related to the three obstacles.
Our results firstly show that a fully-equipped contractor who opportunistically exploits a relatively small proportion (less than 10%) of the contracted farmers in most instances can outperform spot market-based contractors in terms of average profit achieved for each crop. Secondly, a committed contractor who offers lower purchasing prices than the most typical rate can obtain better earnings per ton of rice as well as higher profit per crop. However, those contractors in both cases could not enlarge their contract farming scheme, since either farmers’ trust toward them decreases gradually or their offers are unable to compete with the benefits from a competitor or the spot market. Thirdly, the results are also in agreement with the existing literature that the contract farming scheme is not a cost-effective method for buyers with limited rice processing capacity, which is a common situation among the contractors in the MKD region.
Direct versus Connect
Steven Kimbrough | Published Sunday, January 15, 2023This NetLogo model is an implementation of the mostly verbal (and graphic) model in Jarret Walker’s Human Transit: How Clearer Thinking about Public Transit Can Enrich Our Communities and Our Lives (2011). Walker’s discussion is in the chapter “Connections or Complexity?”. See especially figure 12-2, which is on page 151.
In “Connections or Complexity?”, Walker frames the matter as involving a choice between two conflicting goals. The first goal is to minimize connections, the need to make transfers, in a transit system. People naturally prefer direct routes. The second goal is to minimize complexity. Why? Well, read the chapter, but as a general proposition we want to avoid unnecessary complexity with its attendant operating characteristics (confusing route plans in the case of transit) and management and maintenance challenges. With complexity general comes degraded robustness and resilience.
How do we, how can we, choose between these conflicting goals? The grand suggestion here is that we only choose indirectly, implicitly. In the present example of connections versus complexity we model various alternatives and compare them on measures of performance (MoP) other than complexity or connections per se. The suggestion is that connections and complexity are indicators of, heuristics for, other MoPs that are more fundamental, such as cost, robustness, energy use, etc., and it is these that we at bottom care most about. (Alternatively, and not inconsistently, we can view connections and complexity as two of many MoPs, with the larger issue to be resolve in light of many MoPs, including but not limited to complexity and connections.) We employ modeling to get a handle on these MoPs. Typically, there will be several, taking us thus to a multiple criteria decision making (MCDM) situation. That’s the big picture.
Displaying 10 of 537 results for "Niklas Hase" clear search