About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 57 results control clear search
Population Control
David Shanafelt | Published Monday, December 13, 2010 | Last modified Saturday, April 27, 2013This model looks at the effects of a “control” on agent populations. Much like farmers spraying pesticides/herbicides to manage pest populations, the user sets a control management regiment to be use
Soil microbe-predator model with enzymes
Randall Boone John C Moore Akihiro Koyama Kirstin Holfelder | Published Thursday, November 21, 2013We seek to improve understanding of roles enzyme play in soil food webs. We created an agent-based simulation of a simple food web that includes enzymatic activity. The model was used in a publication, Moore et al. (in press; Biochemistry).
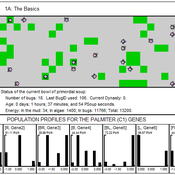
00 PSoup V1.22 – Primordial Soup
Garvin Boyle | Published Thursday, April 13, 2017PSoup is an educational program in which evolution is demonstrated, on the desk-top, as you watch. Blind bugs evolve sophisticated heuristic search algorithms to be the best at finding food fast.
Firm explore-exploit of knowledge
Rosanna Garcia | Published Monday, March 28, 2011 | Last modified Saturday, April 27, 2013The basic premise of the model is to simulate several ‘agents’ going through build-buy cycles: Build: Factories follow simple rules of strategy in the allocation of resources between making exploration and exploitation type products. Buy: Each of two types of Consumers, early-adopters and late adopters, follow simple purchase decision rules in deciding to purchase a product from one of two randomly chosen factories. Thus, the two working ‘agents’ of the model are ‘factories’ and […]
The AgriculTural LandscApe Simulator (ATLAS)
Hugo Thierry Aude Vialatte Jean-Philippe Choisis Benoit Gaudou Hazel Parry Claude Monteil | Published Monday, January 30, 2017 | Last modified Wednesday, May 10, 2017The spatially-explicit AgriculTuralLandscApe Simulator (ATLAS) simulates realistic spatial-temporal crop availability at the landscape scale through crop rotations and crop phenology.
Mast seeding model
Lucia Tamburino Giangiacomo Bravo | Published Saturday, September 08, 2012 | Last modified Saturday, April 27, 2013Purpose of the model is to perform a “virtual experiment” to test the predator satiation hypothesis, advanced in literature to explain the mast seeding phenomenon.
ManPest
François Rebaudo | Published Tuesday, February 25, 2014 | Last modified Wednesday, August 27, 2014The purpose of the model is to explore the impacts of global change on the ability of a community of farmers to adapt their practices to an agricultural pest.

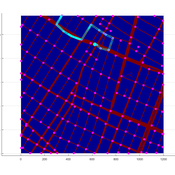
Eixample-MAS Traffic Simulation
Àlex Pardo Fernandez David Sánchez Pinsach | Published Tuesday, January 22, 2013 | Last modified Saturday, April 27, 2013This MAS simulates the traffic of Barcelona Eixample. Uses a centralized AI system in order to control the traffic lights. Car agents are reactive and have no awareness of the intelligence of the system. They (try to) avoid collisions.
Agent-based model of WiFi tracking system in urban environment
Christopher Thron Khoi Tran | Published Friday, April 21, 2017This code simulates the WiFi user tracking system described in: Thron et al., “Design and Simulation of Sensor Networks for Tracking Wifi Users in Outdoor Urban Environments”. Testbenches used to create the figures in the paper are included.
Peer reviewed Horse population dynamics
Nika Galic | Published Tuesday, November 12, 2013 | Last modified Wednesday, October 29, 2014This model investigates the link between prescribed growth in body size, population dynamics and density dependence through population feedback on available resources.
Displaying 10 of 57 results control clear search