About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 61 results design clear search
CoComForest
Wuthiwong WIMOLSAKCHAROEN | Published Tuesday, February 02, 2021The name of the model, CoComForest, stands for COllaborative COMmunity FOREST management. The purposes of this model are to expose local resource harvesters to the competition with external resource harvesters, called outsiders, and to provide them the opportunity to collectively discuss on resource management. The model, which is made of a set of interconnected entities, including (i) community forest habitat, (ii) resource harvesters, (iii) market, and (iv) firebreak. More details about the CoComForest model are described based on the Overview, Design concept, and Details (ODD) protocol uploaded with the model.
VIDA: A simulation model of domestic VIolence in times of social DistAncing
Bernardo Furtado | Published Monday, January 11, 2021Violence against women occurs predominantly in the family and domestic context. The COVID-19 pandemic led Brazil to recommend and, at times, impose social distancing, with the partial closure of economic activities, schools, and restrictions on events and public services. Preliminary evidence shows that intense co- existence increases domestic violence, while social distancing measures may have prevented access to public services and networks, information, and help. We propose an agent-based model (ABM), called VIDA, to illustrate and examine multi-causal factors that influence events that generate violence. A central part of the model is the multi-causal stress indicator, created as a probability trigger of domestic violence occurring within the family environment. Two experimental design tests were performed: (a) absence or presence of the deterrence system of domestic violence against women and measures to increase social distancing. VIDA presents comparative results for metropolitan regions and neighbourhoods considered in the experiments. Results suggest that social distancing measures, particularly those encouraging staying at home, may have increased domestic violence against women by about 10%. VIDA suggests further that more populated areas have comparatively fewer cases per hundred thousand women than less populous capitals or rural areas of urban concentrations. This paper contributes to the literature by formalising, to the best of our knowledge, the first model of domestic violence through agent-based modelling, using empirical detailed socioeconomic, demographic, educational, gender, and race data at the intraurban level (census sectors).

SESPES: socio-ecological systems and payment for ecosystem services model
Eulàlia Baulenas | Published Sunday, December 20, 2020 | Last modified Sunday, December 20, 2020The purpose of this spatially-explicit agent-based model is to intervene in the debate about PES policy design, implementation and context. We use the case for a woodland-for-water payment for ecosystem services (PES) and model its implementation in a local area of Catalonia (NE Spain). The model is based on three sub-models. The structural contains four different designs of a PES policy. The social sub-model includes agent-based factors, by having four types of landowner categories managing or not the forests. This sub-model is based on behavioral studies and assumptions about reception and reaction to incentive policies from European-focused studies. The ecological sub-model is based on climate change data for the area. The output are the evolution of the ecological and social goals of the policy under different policy design scenarios. Our focus in Europe surges from the general context of land abandonment that many Mediterranean areas and Eastern countries are experiencing, and the growing interest from policy-makers and practitioners on the implementation of PES schemes to ameliorate this situation.

We construct a new type of agent-based model (ABM) that can simultaneously simulate land-use changes at multiple distant places (namely TeleABM, telecoupled agent-based model). We use soybean trade between Brazil and China as an example, where Brazil is the sending system and China is the receiving system because they are the world’s largest soybean exporter and importer respectively. We select one representative county in each country to calibrate and validate the model with spatio-temporal analysis of historical land-use changes and the empirical analysis of household survey data. The whole model is programmed on RePast Simphony. The most unique features of TeleABM are that it can simulate a telecoupled system and the flows between sending and receiving systems in this telecoupled system.
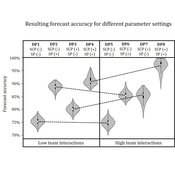
Demand Planning Model
Jonas Hauke Iris Lorscheid Matthias Meyer | Published Wednesday, October 04, 2017Demand planning requires processing of distributed information. In this process, individuals, their properties and interactions play a crucial role. This model is a computational testbed to investigate these aspects with respect to forecast accuracy.
Agent-Based Computational Modeling of Cryptocurrency Design
Felix Ude | Published Friday, June 28, 2019Agent-Based Computational Model of the cryptocurrency Bitcoin with a realistic market and transaction system. Bitcoin’s transaction limit (i.e. block size) and Bitcoin generation can be calibrated and optimized for wealth and network’s hashing power by the Non-Dominated Sorted Genetic Algorithm - II.

Bicycle encounter model
Gudrun Wallentin | Published Saturday, October 29, 2016 | Last modified Friday, March 29, 2019This Bicycle encounter model builds on the Salzburg Bicycle model (Wallentin & Loidl, 2015). It simulates cyclist flows and encounters, which are locations of potential accidents between cyclists.
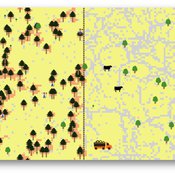
TRUE GRASP (Tree Recruitment Under Exotic GRAsses in a Savanna-Pineland)
is a socio-ecological agent-based model (ABM) and role playing game (RPG) for farmers and other stakeholders involved in rural landscape planning.
The purpose of this model is to allow actors to explore the individual and combined effects - as well as tradeoffs - of three methods of controlling exotic grasses in pine savannas: fire, weeding, and grazing cattle.
Design of TRUE GRASP is based on 3 years of socio-ecological fieldwork in a human-induced pine savanna in La Sepultura Biosphere Reserve (SBR) in the Mexican state of Chiapas. In this savanna, farmers harvest resin from Pinus oocarpa, which is used to produce turpentine and other products. However, long term persistence of this activity is jeopardized by low tree recruitment due to exotic tall grass cover in the forest understory (see Braasch et al., 2017). The TRUE GRASP model provides the user with different management strategies for controlling exotic grass cover and avoiding possible regime shifts, which in the case of the SBR would jeopardize resin harvesting.
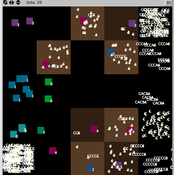
DiDIY Factory
Ruth Meyer | Published Tuesday, February 20, 2018The DiDIY-Factory model is a model of an abstract factory. Its purpose is to investigate the impact Digital Do-It-Yourself (DiDIY) could have on the domain of work and organisation.
DiDIY can be defined as the set of all manufacturing activities (and mindsets) that are made possible by digital technologies. The availability and ease of use of digital technologies together with easily accessible shared knowledge may allow anyone to carry out activities that were previously only performed by experts and professionals. In the context of work and organisations, the DiDIY effect shakes organisational roles by such disintermediation of experts. It allows workers to overcome the traditionally strict organisational hierarchies by having direct access to relevant information, e.g. the status of machines via real-time information systems implemented in the factory.
A simulation model of this general scenario needs to represent a more or less abstract manufacturing firm with supervisors, workers, machines and tasks to be performed. Experiments with such a model can then be run to investigate the organisational structure –- changing from a strict hierarchy to a self-organised, seemingly anarchic organisation.

A land-use model to illustrate ambiguity in design
Julia Schindler | Published Monday, October 15, 2012 | Last modified Friday, January 13, 2017This is an agent-based model that allows to test alternative designs for three model components. The model was built using the LUDAS design strategy, while each alternative is in line with the strategy. Using the model, it can be shown that alternative designs, though built on the same strategy, lead to different land-use patterns over time.
Displaying 10 of 61 results design clear search