About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 162 results for "Mark R Kramer" clear search
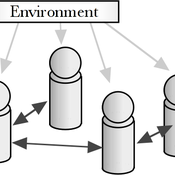
Political Participation
Didier Ruedin | Published Saturday, April 12, 2014 | Last modified Saturday, November 18, 2023Implementation of Milbrath’s (1965) model of political participation. Individual participation is determined by stimuli from the political environment, interpersonal interaction, as well as individual characteristics.
ABODE - Agent Based Model of Origin Destination Estimation
D Levinson | Published Monday, August 29, 2011 | Last modified Saturday, April 27, 2013The agent based model matches origins and destinations using employment search methods at the individual level.
An Agent-Based Model of Space Settlements
Anamaria Berea | Published Wednesday, August 09, 2023 | Last modified Wednesday, November 01, 2023Background: Establishing a human settlement on Mars is an incredibly complex engineering problem. The inhospitable nature of the Martian environment requires any habitat to be largely self-sustaining. Beyond mining a few basic minerals and water, the colonizers will be dependent on Earth resupply and replenishment of necessities via technological means, i.e., splitting Martian water into oxygen for breathing and hydrogen for fuel. Beyond the technical and engineering challenges, future colonists will also face psychological and human behavior challenges.
Objective: Our goal is to better understand the behavioral and psychological interactions of future Martian colonists through an Agent-Based Modeling (ABM simulation) approach. We seek to identify areas of consideration for planning a colony as well as propose a minimum initial population size required to create a stable colony.
Methods: Accounting for engineering and technological limitations, we draw on research regarding high performing teams in isolated and high stress environments (ex: submarines, Arctic exploration, ISS, war) to include the 4 NASA personality types within the ABM. Interactions between agents with different psychological profiles are modeled at the individual level, while global events such as accidents or delays in Earth resupply affect the colony as a whole.
Results: From our multiple simulations and scenarios (up to 28 Earth years), we found that an initial population of 22 was the minimum required to maintain a viable colony size over the long run. We also found that the Agreeable personality type was the one more likely to survive.
Conclusion We developed a simulation with easy to use GUI to explore various scenarios of human interactions (social, labor, economic, psychological) on a future colony on Mars. We included technological and engineering challenges, but our focus is on the behavioral and psychological effects on the sustainability of the colony on the long run. We find, contrary to other literature, that the minimum number of people with all personality types that can lead to a sustainable settlement is in the tens and not hundreds.
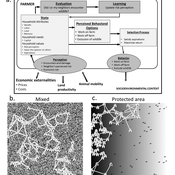
Wildlife-Human Interactions in Shared Landscapes (WHISL)
Andres Baeza-Castro Neil Carter Nicholas Magliocca | Published Friday, May 22, 2020This model simulates a group of farmers that have encounters with individuals of a wildlife population. Each farmer owns a set of cells that represent their farm. Each farmer must decide what cells inside their farm will be used to produce an agricultural good that is self in an external market at a given price. The farmer must decide to protect the farm from potential encounters with individuals of the wildlife population. This decision in the model is called “fencing”. Each time that a cell is fenced, the chances of a wildlife individual to move to that cell is reduced. Each encounter reduces the productive outcome obtained of the affected cell. Farmers, therefore, can reduce the risk of encounters by exclusion. The decision of excluding wildlife is made considering the perception of risk of encounters. In the model, the perception of risk is subjective, as it depends on past encounters and on the perception of risk from other farmers in the community. The community of farmers passes information about this risk perception through a social network. The user (observer) of the model can control the importance of the social network on the individual perception of risk.
John Q. Public (JQP): A Model of Political Judgment and Behavior
Sung-Youn Kim | Published Monday, March 14, 2011 | Last modified Saturday, April 27, 2013The model integrates major theories of political judgment and behavior within the classical cognitive paradigm embedded in the ACT-R cognitive architecture. It models preferences and beliefs of political candidates, parties, and groups.
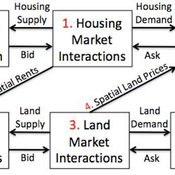
Coupled Housing and Land Markets (CHALMS)
Nicholas Magliocca Virginia Mcconnell Margaret Walls | Published Friday, November 02, 2012 | Last modified Monday, October 27, 2014CHALMS simulates housing and land market interactions between housing consumers, developers, and farmers in a growing ex-urban area.
Stylized agricultural land-use model for resilience exploration
Patrick Bitterman | Published Tuesday, June 14, 2016 | Last modified Monday, April 08, 2019This model is a highly stylized land use model in the Clear Creek Watershed in Eastern Iowa, designed to illustrate the construction of stability landscapes within resilience theory.

Kulayinjana
Christophe Le Page Arthur Perrotton Michel De Garine-Wichatitsky Barry Bitu Killion Koyisi Ferdinand Mwamba Cephus Ncube Victor Ncube Siphusisiwe Ndlovu Raphael Ngwenya Ambu Nyathi Fumbane Nyathi Patrick Sibanda Zenzo Sibanda | Published Monday, October 03, 2016a computer-based role-playing game simulating the interactions between farming activities, livestock herding and wildlife in a virtual landscape reproducing local socioecological dynamics at the periphery of Hwange National Park (Zimbabwe).
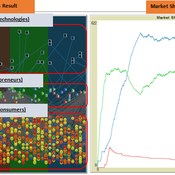
The simulation on the study of the optimal business strategy with the interaction between technologies and consumers.
sej-yoo | Published Monday, June 27, 2022 | Last modified Monday, July 04, 2022HOW IT WORKS
This model consists of three agents, and each agent type operates per business theories as below.
a. New technologies(Tech): It evolves per sustaining or disruptive technology trajectory with the constraint of project management triangle (Scope, Time, Quality, and Cost).
b. Entrepreneurs(Entre): It builds up the solution by combining Tech components per its own strategy (Exploration, Exploitation, or Ambidex).
c. Consumer(Consumer): It selects the solution per its own preference due to Diffusion of innovation theory (Innovators, Early Adopters, Early Majority, Late Majority, Laggards)
…
Peer reviewed SWIRS Spread of a woody invader in riparian systems
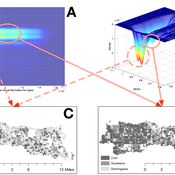
Beatriz Sosa Moira Zellner Carlos Andrés Chiale | Published Tuesday, May 09, 2023Riparian forests are one of the most vulnerable ecosystems to the development of biological invasions, therefore limiting their spread is one of the main challenges for conservation. The main factors that explain plant invasions in these ecosystems are the capacity for both short- and long-distance seed dispersion, and the occurrence of suitable habitats that facilitate the establishment of the invasive species. Large floods constitute an abiotic filter for invasion.
This model simulates the spatio-temporal spread of the woody invader Gleditsia. triacanthos in the riparian forest of the National Park Esteros de Farrapos e Islas del Río Uruguay, a riparian system in the coast of the Uruguay river (South America). In this model, we represent different environmental conditions for the development of G. triacanthos, long- and short-distance spread of its fruits, and large floods as the main factor of mortality for fruit and early stages.
Field results show that the distribution pattern of this invasive species is limited by establishment, i.e. it spreads locally through the expansion of small areas, and remotely through new invasion foci. This model recreates this dispersion pattern. We use this model to derive management implications to control the spread of G. triacanthos
Displaying 10 of 162 results for "Mark R Kramer" clear search