About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 279 results for "William J. Berger" clear search
Peer reviewed A Bayesian Nash Equilibrium (BNE)-informed ABM for pedestrian evacuation in different constricted spaces
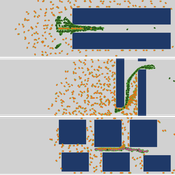
Yiyu Wang Jiaqi Ge Alexis Comber | Published Wednesday, October 11, 2023This BNE-informed ABM ultimately aims to provide a more realistic description of complicated pedestrian behaviours especially in high-density and life-threatening situations. Bayesian Nash Equilibrium (BNE) was adopted to reproduce interactive decision-making process among rational and game-playing agents. The implementations of 3 behavioural models, which are Shortest Route (SR) model, Random Follow (RF) model, and BNE model, make it possible to simulate emergent patterns of pedestrian behaviours (e.g. herding and self-organised queuing behaviours, etc.) in emergency situations.
According to the common features of previous mass trampling accidents, a series of simulation experiments were performed in space with 3 types of barriers, which are Horizontal Corridors, Vertical Corridors, and Random Squares, standing for corridors, bottlenecks and intersections respectively, to investigate emergent behaviours of evacuees in varied constricted spatial environments. The output of this ABM has been available at https://data.mendeley.com/datasets/9v4byyvgxh/1.
Cellular automata model of social networks
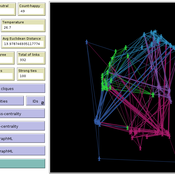
Rubens de Almeida Zimbres | Published Tuesday, August 02, 2022This project was developed during the Santa Fe course Introduction to Agent-Based Modeling 2022. The origin is a Cellular Automata (CA) model to simulate human interactions that happen in the real world, from Rubens and Oliveira (2009). These authors used a market research with real people in two different times: one at time zero and the second at time zero plus 4 months (longitudinal market research). They developed an agent-based model whose initial condition was inherited from the results of the first market research response values and evolve it to simulate human interactions with Agent-Based Modeling that led to the values of the second market research, without explicitly imposing rules. Then, compared results of the model with the second market research. The model reached 73.80% accuracy.
In the same way, this project is an Exploratory ABM project that models individuals in a closed society whose behavior depends upon the result of interaction with two neighbors within a radius of interaction, one on the relative “right” and other one on the relative “left”. According to the states (colors) of neighbors, a given cellular automata rule is applied, according to the value set in Chooser. Five states were used here and are defined as levels of quality perception, where red (states 0 and 1) means unhappy, state 3 is neutral and green (states 3 and 4) means happy.
There is also a message passing algorithm in the social network, to analyze the flow and spread of information among nodes. Both the cellular automaton and the message passing algorithms were developed using the Python extension. The model also uses extensions csv and arduino.
Multi-level model of attitudinal dynamics
Ingo Wolf | Published Wednesday, April 06, 2016 | Last modified Wednesday, May 04, 2016A model of attitudinal dynamics based on the cognitive mechanism of emotional coherence. The code is written in Java. For initialization an additional dataset is required.

Peer reviewed Emergence of Organizations out of Garbage Can Dynamics
Guido Fioretti | Published Monday, April 20, 2020 | Last modified Sunday, April 26, 2020The Garbage Can Model of Organizational Choice (GCM) is a fundamental model of organizational decision-making originally propossed by J.D. Cohen, J.G. March and J.P. Olsen in 1972. In their model, decisions are made out of random meetings of decision-makers, opportunities, solutions and problems within an organization.
With this model, these very same agents are supposed to meet in society at large where they make decisions according to GCM rules. Furthermore, under certain additional conditions decision-makers, opportunities, solutions and problems form stable organizations. In this artificial ecology organizations are born, grow and eventually vanish with time.
Heuristic Algorithm for Generating Strategic Coalition Structures
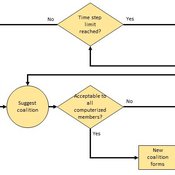
Andrew Collins Daniele Vernon-Bido | Published Monday, October 12, 2020The purpose of the model is to generate coalition structures of different glove games, using a specially designed algorithm. The coalition structures can be are later analyzed by comparing them to core partitions of the game used. Core partitions are coalition structures where no subset of players has an incentive to form a new coalition.
The algorithm used in this model is an advancement of the algorithm found in Collins & Frydenlund (2018). It was used used to generate the results in Vernon-Bido & Collins (2021).
Rangeland and evolution of management styles
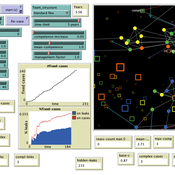
Marco Janssen | Published Tuesday, January 14, 2020Provided is a landscape of properties where pastoralists make decisions how much livestock they put on their property and how much to suppress fire from occuring. Rangelands can be grass dominated, or unproductive shrubb dominated. Overgrazing and fire suppresion lead to shrub dominated landscapes. What management strategies evolve, and how is this impacted by policies?
The model is discussed in Introduction to Agent-Based Modeling by Marco Janssen. For more information see https://intro2abm.com/.
Team Structure and Task Performance
Davide Secchi Martin Neumann | Published Monday, August 05, 2024This model was designed to study resilience in organizations. Inspired by ethnographic work, it follows the simple goal to understand whether team structure affects the way in which tasks are performed. In so doing, it compares the ‘hybrid’ data-inspired structure with three more traditional structures (i.e. hierarchy, flexible/relaxed hierarchy, and anarchy/disorganization).
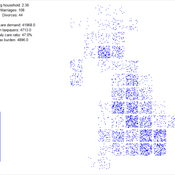
Simulating the cost of social care in an ageing population
Eric Silverman | Published Thursday, September 16, 2021This model is an agent-based simulation written in Python 2.7, which simulates the cost of social care in an ageing UK population. The simulation incorporates processes of population change which affect the demand for and supply of social care, including health status, partnership formation, fertility and mortality. Fertility and mortality rates are drawn from UK population data, then projected forward to 2050 using the methods developed by Lee and Carter 1992.
The model demonstrates that rising life expectancy combined with lower birthrates leads to growing social care costs across the population. More surprisingly, the model shows that the oft-proposed intervention of raising the retirement age has limited utility; some reductions in costs are attained initially, but these reductions taper off beyond age 70. Subsequent work has enhanced and extended this model by adding more detail to agent behaviours and familial relationships.
The version of the model provided here produces outputs in a format compatible with the GEM-SA uncertainty quantification software by Kennedy and O’Hagan. This allows sensitivity analyses to be performed using Gaussian Process Emulation.
Learning Extension - RAGE RAngeland Grazing Model
Cristina I. Apetrei Nikita Strelkovskii Nikolay Khabarov Valeria Javalera Rincón | Published Saturday, July 22, 2023This is an extension of the original RAGE model (Dressler et al. 2018), where we add learning capabilities to agents, specifically learning-by-doing and social learning (two processes central to adaptive (co-)management).
The extension module is applied to smallholder farmers’ decision-making - here, a pasture (patch) is the private property of the household (agent) placed on it and there is no movement of the households. Households observe the state of the pasture and their neighrbours to make decisions on how many livestock to place on their pasture every year. Three new behavioural types are created (which cannot be combined with the original ones): E-RO (baseline behaviour), E-LBD (learning-by-doing) and E-RO-SL1 (social learning). Similarly to the original model, these three types can be compared regarding long-term social-ecological performance. In addition, a global strategy switching option (corresponding to double-loop learning) allows users to study how behavioural strategies diffuse in a heterogeneous population of learning and non-learning agents.
An important modification of the original model is that extension agents are heterogeneous in how they deal with uncertainty. This is represented by an agent property, called the r-parameter (household-risk-att in the code). The r-parameter is catch-all for various factors that form an agent’s disposition to act in a certain way, such as: uncertainty in the sensing (partial observability of the resource system), noise in the information received, or an inherent characteristic of the agent, for instance, their risk attitude.
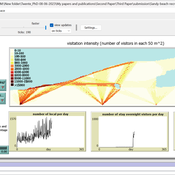
Sandy Beach Visitor Flow: An Agent-Based Model
Elham Bakhshianlamouki | Published Thursday, March 14, 2024The model is intended to simulate visitor spatial and temporal dynamics, encompassing their numbers, activities, and distribution along a coastline influenced by beach landscape design. Our primary focus is understanding how the spatial distribution of services and recreational facilities (e.g., beach width, entrance location, recreational facilities, parking availability) impacts visitation density. Our focus is not on tracking the precise visitation density but rather on estimating the areas most affected by visitor activity. This comprehension allows for assessing the diverse influences of beach layouts on spatial visitor density and, consequently, on the landscape’s biophysical characteristics (e.g., vegetation, fauna, and sediment features).
Displaying 10 of 279 results for "William J. Berger" clear search