Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 331 results for "Michael D. Slater" clear search

SMILI-T: Small-scale fisheries institutions and local interactions for transformations
Emilie Lindkvist Maja Schlüter Xavier Basurto | Published Tuesday, January 09, 2018 | Last modified Friday, March 26, 2021This model examines how financial and social top-down interventions interplay with the internal self-organizing dynamics of a fishing community. The aim is to transform from hierarchical fishbuyer-fisher relationship into fishing cooperatives.
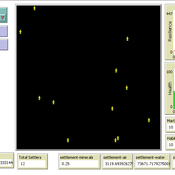
An Agent-Based Model of Space Settlements
Anamaria Berea | Published Wednesday, August 09, 2023 | Last modified Wednesday, November 01, 2023Background: Establishing a human settlement on Mars is an incredibly complex engineering problem. The inhospitable nature of the Martian environment requires any habitat to be largely self-sustaining. Beyond mining a few basic minerals and water, the colonizers will be dependent on Earth resupply and replenishment of necessities via technological means, i.e., splitting Martian water into oxygen for breathing and hydrogen for fuel. Beyond the technical and engineering challenges, future colonists will also face psychological and human behavior challenges.
Objective: Our goal is to better understand the behavioral and psychological interactions of future Martian colonists through an Agent-Based Modeling (ABM simulation) approach. We seek to identify areas of consideration for planning a colony as well as propose a minimum initial population size required to create a stable colony.
Methods: Accounting for engineering and technological limitations, we draw on research regarding high performing teams in isolated and high stress environments (ex: submarines, Arctic exploration, ISS, war) to include the 4 NASA personality types within the ABM. Interactions between agents with different psychological profiles are modeled at the individual level, while global events such as accidents or delays in Earth resupply affect the colony as a whole.
Results: From our multiple simulations and scenarios (up to 28 Earth years), we found that an initial population of 22 was the minimum required to maintain a viable colony size over the long run. We also found that the Agreeable personality type was the one more likely to survive.
Conclusion We developed a simulation with easy to use GUI to explore various scenarios of human interactions (social, labor, economic, psychological) on a future colony on Mars. We included technological and engineering challenges, but our focus is on the behavioral and psychological effects on the sustainability of the colony on the long run. We find, contrary to other literature, that the minimum number of people with all personality types that can lead to a sustainable settlement is in the tens and not hundreds.
HyperMu’NmGA - Effect of Hypermutation Cycles in a NetLogo Minimal Genetic Algorithm
Cosimo Leuci | Published Tuesday, October 27, 2020 | Last modified Sunday, July 31, 2022A minimal genetic algorithm was previously developed in order to solve an elementary arithmetic problem. It has been modified to explore the effect of a mutator gene and the consequent entrance into a hypermutation state. The phenomenon seems relevant in some types of tumorigenesis and in a more general way, in cells and tissues submitted to chronic sublethal environmental or genomic stress.
For a long time, some scholars suppose that organisms speed up their own evolution by varying mutation rate, but evolutionary biologists are not convinced that evolution can select a mechanism promoting more (often harmful) mutations looking forward to an environmental challenge.
The model aims to shed light on these controversial points of view and it provides also the features required to check the role of sex and genetic recombination in the mutator genes diffusion.
The Pampas Model: An agent-based model of agricultural systems in the Argentinean Pampas
Michael North Federico Bert Guillermo P Podestá Santiago L Rovere Charles Macal | Published Tuesday, July 16, 2013 | Last modified Tuesday, February 17, 2015The Pampas Model is an Agent-Based Model intended to explore the dynamics of structural and land use changes in agricultural systems of the Argentine Pampas in response to climatic, technological economic, and political drivers.
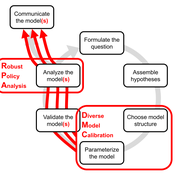
DMC-RPA: Diverse Model Calibration for Robust Policy Analysis (applied to an ABM of smallholder farmer resilience)
Tim Williams | Published Sunday, August 30, 2020This repository contains: (1) a model calibration procedure that identifies a set of diverse, plausible models; and (2) an ABM of smallholder agriculture, which is used as a case study application for the calibration method. By identifying a set of diverse models, the calibration method attends to the issue of “equifinality” prevalent in complex systems, which is a situation where multiple plausible process descriptions exist for a single outcome.
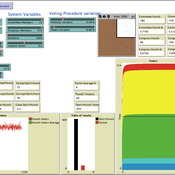
Sunshine or Shield?: Secret Voting Procedures and Legislative Accountability
Matthew Taylor Michele Buttò Carlos Pereira | Published Tuesday, June 24, 2014 | Last modified Monday, April 08, 2019An agent-based model is used to simulate legislators’ behavior under secret voting rules, as influenced by the power of the accused politician, the composition of the voting body, and the publicity of the accusations.

Simulation of the Effects of Disorganization on Goals and Problem Solving
Dinuka Herath | Published Sunday, August 13, 2017 | Last modified Sunday, August 13, 2017This is a model of the occurrence of disorganization and its impact on individual goal setting and problem-solving. This model therefore, explores the effects of disorganization on goal achievement.
Peer reviewed Circular Business Model experimentation: local biodigestion network
Igor Nikolic Kasper Pieter Hendrik Lange Gijsbert Korevaar Paulien Herder | Published Thursday, December 17, 2020 | Last modified Tuesday, June 29, 2021The purpose of the model is to explore the influence of the design of circular business models (CBMs) on CBM viability. The model represents an Industrial Symbiosis Network (ISN) in which a processor uses the organic waste from suppliers to produce biogas and nutrient rich digestate for local reuse. CBM viability is expressed as value captured (e.g., cash flow/tonne waste/agent) and the survival of the network over time (shown in the interface).
In the model, the value captured is calculated relative to the initial state, using incineration costs as a benchmark. Moderating variables are interactions with the waste incinerator and actor behaviour factors. Actors may leave the network when the waste supply for local production is too low, or when personal economic benefits are too low. When the processor decides to leave, the network fails. Theory of planned behaviour can be used to include agent behaviour in the simulations.
MiniDemographicABM.jl: A simplified agent-based demographic model of the UK
Atiyah Elsheikh | Published Friday, July 28, 2023 | Last modified Tuesday, December 12, 2023This package implements a simplified artificial agent-based demographic model of the UK. Individuals of an initial population are subject to ageing, deaths, births, divorces and marriages. A specific case-study simulation is progressed with a user-defined simulation fixed step size on a hourly, daily, weekly, monthly basis or even an arbitrary user-defined clock rate. While the model can serve as a base model to be adjusted to realistic large-scale socio-economics, pandemics or social interactions-based studies mainly within a demographic context, the main purpose of the model is to explore and exploit capabilities of the state-of-the-art Agents.jl Julia package as well as other ecosystem of Julia packages like GlobalSensitivity.jl. Code includes examples for evaluating global sensitivity analysis using Morris and Sobol methods and local sensitivity analysis using OFAT and OAT methods. Multi-threaded parallelization is enabled for improved runtime performance.

From Boundary Crossings to Global Connectivity: A Minimal Mechanism in Structured Agent-Based Landscapes
Fabio Nelli | Published Sunday, May 17, 2026This repository contains the Python implementation of an agent-based model investigating how localized boundary-crossing dynamics generate large-scale connectivity in structured multi-attractor landscapes.
Agents evolve in a continuous two-dimensional environment composed of attractor basins. A fraction of agents exhibits exploratory higher-mobility dynamics, while the remaining agents remain locally constrained. The model analyzes how localized configurational transitions accumulate into transition networks that progressively integrate the explored state space.
The repository includes:
…
Displaying 10 of 331 results for "Michael D. Slater" clear search