About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 64 results space clear search
Peer reviewed BAM: The Bottom-up Adaptive Macroeconomics Model
Alejandro Guerra-Hernández Alejandro Platas López | Published Tuesday, January 14, 2020 | Last modified Sunday, July 26, 2020Overview
Purpose
Modeling an economy with stable macro signals, that works as a benchmark for studying the effects of the agent activities, e.g. extortion, at the service of the elaboration of public policies..
…
Peer reviewed Applying Brantingham’s Neutral Model of Stone Raw Material Procurement to the Pinnacle Point Middle Stone Age Record, Western Cape, South Africa
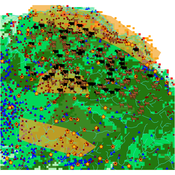
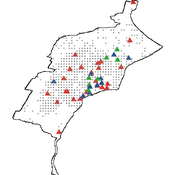
Simen Oestmo Marco Janssen Haley Cawthra | Published Sunday, March 10, 2019This model is an application of Brantingham’s neutral model to a real landscape with real locations of potential sources. The sources are represented as their sizes during current conditions, and from marine geophysics surveys, and the agent starts at a random location in Mossel Bay Region (MBR) surrounding the Archaeological Pinnacle Point (PP) locality, Western Cape, South Africa. The agent moves at random on the landscape, picks up and discards raw materials based only upon space in toolkit and probability of discard. If the agent happens to encounter the PP locality while moving at random the agent may discard raw materials at it based on the discard probability.
Peer reviewed Strategy with Externalities
J M Applegate Glenn Hoetker | Published Thursday, December 21, 2017The SWE models firms search behaviour as the performance landscape shifts. The shift represents society’s pricing of negative externalities, and the performance landscape is an NK structure. The model is written in NetLogo.
Peer reviewed Ideal Free Distribution of Mobile Pastoralists in the Logone Floodplain, Cameroon
Mark Moritz Ian M Hamilton Andrew Yoak Hongyang Pi Jeff Cronley Paul Maddock | Published Thursday, June 19, 2014 | Last modified Saturday, January 06, 2018The purpose of the model is to examine whether and how mobile pastoralists are able to achieve an Ideal Free Distribution (IFD).
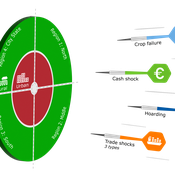
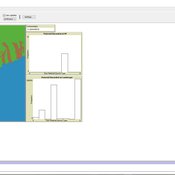
DARTS: modelling effects of shocks on global, regional, urban and rural food security
Pepijn van Oort Hubert Fonteijn Geerten Hengeveld | Published Tuesday, June 18, 2024Food trade networks represent a complex system where food is periodically produced in different regions of the world. Food is continuously stocked and traded. Food security in a globalised world is vulnerable to shocks. We present DARTS, a new agent based model that models monthly dynamics of food production, trade, stocking, consumption and food security for different interconnected world regions and a city state. Agents in different regions differ in their harvest seasons, wealth (rich and poor), degree of urbanisation and connection to domestic and global markets. DARTS was specifically designed to model direct and indirect effects of shocks in the food system. We introduce a new typology of 6 distinct shock types and analyse their impact on food security, modelling local and global effects and short term and longer term effects. An second important scientific novelty of the model is that DARTS can also model indirect effects of shocks (cascading in space and in time, lag effects due to trade and food stock buffering). A third important scientific novelty of the model is its’ capability of modelling food security at different scales, in which the rural/urban divide and differences in (intra-annually varying) production and trade connections play a key role. At the time of writing DARTS is yet insufficiently parameterised for accurate prediction for real world regions and cities. Simulations for a hypothetical in silico world with 3 regions and a city state show that DARTS can reproduce rich and complex dynamics with analogues in the real world. The scientific interest is more on deepening insight in process dynamics and chains of events that lead to ultimate shock effects on food security.
Agent-Based Model of Transhumant Decision-Making Processes in Senegal
Cheick Amed Diloma Gabriel TRAORE Etienne DELAY Djibril Diop Alassane Bah | Published Wednesday, July 03, 2024Sahelian transhumance is a type of socio-economic and environmental pastoral mobility. It involves the movement of herds from their terroir of origin (i.e., their original pastures) to one or more host terroirs, followed by a return to the terroir of origin. According to certain pastoralists, the mobility of herds is planned to prevent environmental degradation, given the continuous dependence of these herds on their environment. However, these herds emit Greenhouse Gases (GHGs) in the spaces they traverse. Given that GHGs contribute to global warming, our long-term objective is to quantify the GHGs emitted by Sahelian herds. The determination of these herds’ GHG emissions requires: (1) the artificial replication of the transhumance, and (2) precise knowledge of the space used during their transhumance.
This article presents the design of an artificial replication of the transhumance through an agent-based model named MSTRANS. MSTRANS determines the space used by transhumant herds, based on the decision-making process of Sahelian transhumants.
MSTRANS integrates a constrained multi-objective optimization problem and algorithms into an agent-based model. The constrained multi-objective optimization problem encapsulates the rationality and adaptability of pastoral strategies. Interactions between a transhumant and its socio-economic network are modeled using algorithms, diffusion processes, and within the multi-objective optimization problem. The dynamics of pastoral resources are formalized at various spatio-temporal scales using equations that are integrated into the algorithms.
The results of MSTRANS are validated using GPS data collected from transhumant herds in Senegal. MSTRANS results highlight the relevance of integrated models and constrained multi-objective optimization for modeling and monitoring the movements of transhumant herds in the Sahel. Now specialists in calculating greenhouse gas emissions have a reproducible and reusable tool for determining the space occupied by transhumant herds in a Sahelian country. In addition, decision-makers, pastoralists, veterinarians and traders have a reproducible and reusable tool to help them make environmental and socio-economic decisions.
This paper presents an agent-based model to study the dynamics of city-state systems in a constrained environment with limited space and resources. The model comprises three types of agents: city-states, villages, and battalions, where city-states, the primary decision-makers, can build villages for food production and recruit battalions for defense and aggression. In this setting, simulation results, generated through a multi-parameter grid sampling, suggest that risk-seeking strategies are more effective in high-cost scenarios, provided that the production rate is sufficiently high. Also, the model highlights the role of output productivity in defining which strategic preferences are successful in a long-term scenario, with higher outputs supporting more aggressive expansion and military actions, while resource limitations compel more conservative strategies focused on survival and resource conservation. Finally, the results suggest the existence of a non-linear effect of diminishing returns in strategic investments on successful strategies, emphasizing the need for careful resource allocation in a competitive environment.
School Enrollment Model
Catalina Canals Enrique Canessa Spiro Maroulis Alejandra Mizala Sergio Chaigneau | Published Monday, July 08, 2024The School Enrollment Model is a spatially-explicit computational model that depicts a city, with schools and students located within the space. The model represents the Chilean school system, a market-based educational system, where people are free to choose among public, private voucher, or private fee-paying schools. In the model, students become aware of some schools, apply to schools, switch schools, pass or fail grade levels, and eventually either graduate or dropout. Schools select students, update their tuition, test scores, and other characteristics.
The purpose of the model is to represent the Chilean school system and analyze the different mechanisms that affected the enrollment distribution between public, private voucher, and private fee-paying school sectors during the period 2004-2016.
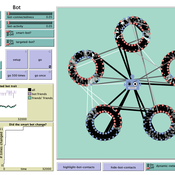
How do bots influence beliefs on social media? Why do beliefs propagated by social bots spread far and wide, yet does their direct influence appear to be limited?
This model extends Axelrod’s model for the dissemination of culture (1997), with a social bot agent–an agent who only sends information and cannot be influenced themselves. The basic network is a ring network with N agents connected to k nearest neighbors. The agents have a cultural profile with F features and Q traits per feature. When two agents interact, the sending agent sends the trait of a randomly chosen feature to the receiving agent, who adopts this trait with a probability equal to their similarity. To this network, we add a bot agents who is given a unique trait on the first feature and is connected to a proportion of the agents in the model equal to ‘bot-connectedness’. At each timestep, the bot is chosen to spread one of its traits to its neighbors with a probility equal to ‘bot-activity’.
The main finding in this model is that, generally, bot activity and bot connectedness are both negatively related to the success of the bot in spreading its unique message, in equilibrium. The mechanism is that very active and well connected bots quickly influence their direct contacts, who then grow too dissimilar from the bot’s indirect contacts to quickly, preventing indirect influence. A less active and less connected bot leaves more space for indirect influence to occur, and is therefore more successful in the long run.
Agent-Based Model for Analyzing the Impact of Movement Factors of Sahelian Transhumant Herds
Cheick Amed Diloma Gabriel TRAORE | Published Tuesday, May 28, 2024Transhumants move their herds based on strategies simultaneously considering several environmental and socio-economic factors. There is no agreement on the influence of each factor in these strategies. In addition, there is a discussion about the social aspect of transhumance and how to manage pastoral space. In this context, agent-based modeling can analyze herd movements according to the strategy based on factors favored by the transhumant. This article presents a reductionist agent-based model that simulates herd movements based on a single factor. Model simulations based on algorithms to formalize the behavioral dynamics of transhumants through their strategies. The model results establish that vegetation, water outlets and the socio-economic network of transhumants have a significant temporal impact on transhumance. Water outlets and the socio-economic network have a significant spatial impact. The significant impact of the socio-economic factor demonstrates the social dimension of Sahelian transhumance. Veterinarians and markets have an insignificant spatio-temporal impact. To manage pastoral space, water outlets should be at least 15 km
from each other. The construction of veterinary centers, markets and the securitization of transhumance should be carried out close to villages and rangelands.
Displaying 10 of 64 results space clear search