About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 52 results movement clear search
Peer reviewed Lethal Geometry
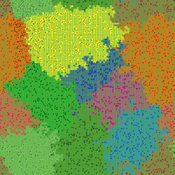
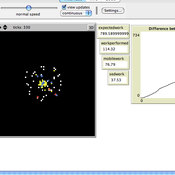
Kristin Crouse | Published Friday, February 21, 2020 | Last modified Wednesday, December 15, 2021LethalGeometry was developed to examine whether territory size influences the mortality risk for individuals within that territory. For animals who live in territoral groups and are lethally aggressive, we can expect that most aggression occurs along the periphery (or border) between two adjacent territories. For territories that are relatively large, the periphery makes up a proportionately small amount of the of the total territory size, suggesting that individuals in these territories might be less likely to die from these territorial skirmishes. LethalGeometry examines this geometric relationship between territory size and mortality risk under realistic assumptions of variable territory size and shape, variable border width, and stochastic interactions and movement.
The individuals (agents) are programmed to walk randomly about their environment, search for and eat food to obtain energy, reproduce if they can, and act aggressively toward individuals of other groups. During each simulation step, individuals analyze their environment and internal state to determine which actions to take. The actions available to individuals include moving, fighting, and giving birth.

Peer reviewed Multilevel Group Selection I
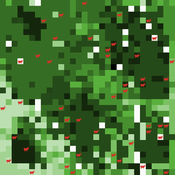
Garry Sotnik Thaddeus Shannon Wayne W. Wakeland | Published Tuesday, April 21, 2020 | Last modified Saturday, July 03, 2021New theoretical agent-based model of population-wide adoption of prosocial common-pool behavior with four parameters (initial percent of adopters, pressure to change behavior, synergy from behavior, and population density); dynamics in behavior, movement, freeriding, and group composition and size; and emergence of multilevel group selection. Theoretical analysis of model’s dynamics identified six regions in model’s parameter space, in which pressure-synergy combinations lead to different outcomes: extinction, persistence, and full adoption. Simulation results verified the theoretical analysis and demonstrated that increases in density reduce number of pressure-synergy combinations leading to population-wide adoption; initial percent of contributors affects underlying behavior and final outcomes, but not size of regions or transition zones between them; and random movement assists adoption of prosocial common-pool behavior.
Peer reviewed Axelrod_Cultural_Dissemination
Arezky Hernández | Published Wednesday, March 27, 2013 | Last modified Sunday, May 05, 2013The Axelrod’s model of cultural dissemination is an agent-model designed to investigate the dissemination of culture among interacting agents on a society.
Peer reviewed FishCensus
Miguel Pais | Published Tuesday, December 06, 2016 | Last modified Thursday, February 09, 2017The FishCensus model simulates underwater visual census methods, where a diver estimates the abundance of fish. A separate model is used to shape species behaviours and save them to a file that can be shared and used by the counting model.
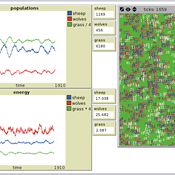
Peer reviewed PPHPC - Predator-Prey for High-Performance Computing
Nuno Fachada | Published Saturday, August 08, 2015 | Last modified Wednesday, November 25, 2015PPHPC is a conceptual model for studying and evaluating implementation strategies for spatial agent-based models (SABMs). It is a realization of a predator-prey dynamic system, and captures important SABMs characteristics.
Peer reviewed Lithic Raw Material Procurement and Provisioning
Jonathan Paige | Published Friday, March 06, 2015 | Last modified Thursday, March 12, 2015This model simulates the lithic raw material use and provisioning behavior of a group that inhabits a permanent base camp, and uses stone tools.
Peer reviewed Ideal Free Distribution of Mobile Pastoralists in the Logone Floodplain, Cameroon
Mark Moritz Ian M Hamilton Andrew Yoak Hongyang Pi Jeff Cronley Paul Maddock | Published Thursday, June 19, 2014 | Last modified Saturday, January 06, 2018The purpose of the model is to examine whether and how mobile pastoralists are able to achieve an Ideal Free Distribution (IFD).
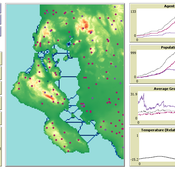
Agent-Based Model of Transhumant Decision-Making Processes in Senegal
Cheick Amed Diloma Gabriel TRAORE Etienne DELAY Djibril Diop Alassane Bah | Published Wednesday, July 03, 2024Sahelian transhumance is a type of socio-economic and environmental pastoral mobility. It involves the movement of herds from their terroir of origin (i.e., their original pastures) to one or more host terroirs, followed by a return to the terroir of origin. According to certain pastoralists, the mobility of herds is planned to prevent environmental degradation, given the continuous dependence of these herds on their environment. However, these herds emit Greenhouse Gases (GHGs) in the spaces they traverse. Given that GHGs contribute to global warming, our long-term objective is to quantify the GHGs emitted by Sahelian herds. The determination of these herds’ GHG emissions requires: (1) the artificial replication of the transhumance, and (2) precise knowledge of the space used during their transhumance.
This article presents the design of an artificial replication of the transhumance through an agent-based model named MSTRANS. MSTRANS determines the space used by transhumant herds, based on the decision-making process of Sahelian transhumants.
MSTRANS integrates a constrained multi-objective optimization problem and algorithms into an agent-based model. The constrained multi-objective optimization problem encapsulates the rationality and adaptability of pastoral strategies. Interactions between a transhumant and its socio-economic network are modeled using algorithms, diffusion processes, and within the multi-objective optimization problem. The dynamics of pastoral resources are formalized at various spatio-temporal scales using equations that are integrated into the algorithms.
The results of MSTRANS are validated using GPS data collected from transhumant herds in Senegal. MSTRANS results highlight the relevance of integrated models and constrained multi-objective optimization for modeling and monitoring the movements of transhumant herds in the Sahel. Now specialists in calculating greenhouse gas emissions have a reproducible and reusable tool for determining the space occupied by transhumant herds in a Sahelian country. In addition, decision-makers, pastoralists, veterinarians and traders have a reproducible and reusable tool to help them make environmental and socio-economic decisions.
Shellmound Mobility
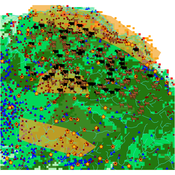
Henrique de Sena Kozlowski | Published Saturday, June 15, 2024Least Cost Path (LCP) analysis is a recurrent theme in spatial archaeology. Based on a cost of movement image, the user can interpret how difficult it is to travel around in a landscape. This kind of analysis frequently uses GIS tools to assess different landscapes. This model incorporates some aspects of the LCP analysis based on GIS with the capabilities of agent-based modeling, such as the possibility to simulate random behavior when moving. In this model the agent will travel around the coastal landscape of Southern Brazil, assessing its path based on the different cost of travel through the patches. The agents represent shellmound builders (sambaquieiros), who will travel mainly through the use of canoes around the lagoons.
How it works?
When the simulation starts the hiker agent moves around the world, a representation of the lagoon landscape of the Santa Catarina state in Southern Brazil. The agent movement is based on the travel cost of each patch. This travel cost is taken from a cost surface raster created in ArcMap to represent the different cost of movement around the landscape. Each tick the agent will have a chance to select the best possible patch to move in its Field of View (FOV) that will take it towards its target destination. If it doesn’t select the best possible patch, it will randomly choose one of the patches to move in its FOV. The simulation stops when the hiker agent reaches the target destination. The elevation raster file and the cost surface map are based on a 1 Arc-second (30m) resolution SRTM image, scaled down 5 times. Each patch represents a square of 150m, with an area of 0,0225km². The dataset uses a UTM Sirgas 2000 22S projection system. There are four different cost functions available to use. They change the cost surface used by the hikers to navigate around the world.
SeaROOTS ABM: Simulating Artificial Hominins Maritime Mobility at Inner Ionian, Greece
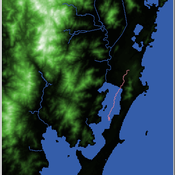
Angelos Chliaoutakis | Published Wednesday, May 29, 2024SeaROOTS ABM is a quite generic agent-based modeling system, for simulating and evaluating potential terrestrial and maritime mobility of artificial hominin groups, configured by available archaeological data and hypotheses. Necessary bathymetric, geomorphological and paleoenvironmental data are combined in order to reconstruct paleoshorelines for the study area and produce an archaeologically significant agent environment. Paleoclimatic and archaeological data are incorporated in the ABM in order to simulate maritime crossings and assess the emergent patterns of interaction between human agency and the sea.
SeaROOTS agent-based system includes completely autonomous, utility-based agents (Chliaoutakis & Chalkiadakis 2016), representing artificial hominin groups, with partial knowledge of their environment, for simulating their evolution and potential maritime mobility, utilizing alternative Least Cost Path analysis modeling techniques (Gustas & Supernant 2017, Gravel-Miguel & Wren 2021). Two groups of hominins, Neanderthals and Homo sapiens, are chosen in order to study the challenges and actions employed as a response to the fluctuating sea-levels, as well as probability scenarios with respect to sea-crossings via buoyant vessels (rafting) or the human body itself (swimming). SeaROOTS ABM aims to simulate various scenarios and investigate the degree climatic fluctuations influenced such activities and interactions in the Middle Paleolithic period.
The model focuses on simulating potential terrestrial and maritime routes, explore the interactions and relations between autonomous agents and their environment, as well as to test specific research questions; for example, when and under what conditions would Middle Paleolithic hominins be more likely to attempt a crossing and successfully reach the islands? By which agent type (Sapiens or Neanderthals) and how (e.g. swimming or by sea-vessels) could such short sea crossings be (mostly) attempted, and which (sea) routes were usually considered by the agents? When does a sea-crossing become a choice and when is it a result of forced migration, i.e. disaster- or conflict-induced displacement? Results show that the dynamic marine environment of the Inner Ionian, our case study in this work, played an important role in their decision-making process.
Displaying 10 of 52 results movement clear search