About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 4 of 14 results fire clear search
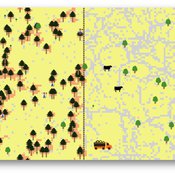
TRUE GRASP (Tree Recruitment Under Exotic GRAsses in a Savanna-Pineland)
is a socio-ecological agent-based model (ABM) and role playing game (RPG) for farmers and other stakeholders involved in rural landscape planning.
The purpose of this model is to allow actors to explore the individual and combined effects - as well as tradeoffs - of three methods of controlling exotic grasses in pine savannas: fire, weeding, and grazing cattle.
Design of TRUE GRASP is based on 3 years of socio-ecological fieldwork in a human-induced pine savanna in La Sepultura Biosphere Reserve (SBR) in the Mexican state of Chiapas. In this savanna, farmers harvest resin from Pinus oocarpa, which is used to produce turpentine and other products. However, long term persistence of this activity is jeopardized by low tree recruitment due to exotic tall grass cover in the forest understory (see Braasch et al., 2017). The TRUE GRASP model provides the user with different management strategies for controlling exotic grass cover and avoiding possible regime shifts, which in the case of the SBR would jeopardize resin harvesting.
On July 20th, James Holmes committed a mass shooting in a midnight showing of The Dark Knight Rises. The Aurora Colorado shooting was used as a test case to validate this framework for modeling mass shootings.
This model was design to test parameters that affects the number of people shot during mass shooting. This basic formulation places a gunman in a crowd and allows the users to manipulate parameters of the gunman.
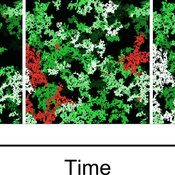
Feedback Loop Example: Wildland Fire Spread
James Millington | Published Friday, December 21, 2012 | Last modified Saturday, April 27, 2013This model is a replication of that described by Peterson (2002) and illustrates the ‘spread’ feedback loop type described in Millington (2013).
Displaying 4 of 14 results fire clear search