About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 4 of 14 results for "Christian Möllmann" clear search

Peer reviewed HUMLAND2: HUMan impact on LANDscapes agent-based model
Anastasia Nikulina Katharine MacDonald Anhelina Zapolska Maria Antonia Serge Marco Davoli Elena A. Pearce Dave van Wees Fulco Scherjon | Published Friday, August 30, 2024The HUMan Impact on LANDscapes (HUMLAND) 2.0.0 is an enhanced version of HUMLAND 1.0.0, developed to track and quantify the intensity of various impacts on landscapes at a continental scale. The model is designed to identify the most influential factors in the transformation of interglacial vegetation, with a particular focus on the burning practices of hunter-gatherers. HUMLAND 2.0.0 incorporates a wide range of spatial datasets as both inputs and targets (expected modelling results) for simulations across Last Interglacial (~130,000–116,000 BP) and Early Holocene (~11,700–8,000 BP).
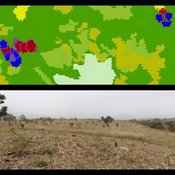
MoPAgrIB: simulating savannah landscape mosaic under shifting cultivation
Nicolas Becu Marc Deconchat Eric Garine Kouami Kokou Christine Raimond | Published Monday, May 27, 2013 | Last modified Tuesday, January 21, 2014MoPAgrIB model simulates the movement of cultivated patches in a savannah vegetation mosaic ; how they move and relocate through the landscape, depending on farming practices, population growth, social rules and vegetation growth.
Learning Extension - RAGE RAngeland Grazing Model
Cristina I. Apetrei Nikita Strelkovskii Nikolay Khabarov Valeria Javalera Rincón | Published Saturday, July 22, 2023This is an extension of the original RAGE model (Dressler et al. 2018), where we add learning capabilities to agents, specifically learning-by-doing and social learning (two processes central to adaptive (co-)management).
The extension module is applied to smallholder farmers’ decision-making - here, a pasture (patch) is the private property of the household (agent) placed on it and there is no movement of the households. Households observe the state of the pasture and their neighrbours to make decisions on how many livestock to place on their pasture every year. Three new behavioural types are created (which cannot be combined with the original ones): E-RO (baseline behaviour), E-LBD (learning-by-doing) and E-RO-SL1 (social learning). Similarly to the original model, these three types can be compared regarding long-term social-ecological performance. In addition, a global strategy switching option (corresponding to double-loop learning) allows users to study how behavioural strategies diffuse in a heterogeneous population of learning and non-learning agents.
An important modification of the original model is that extension agents are heterogeneous in how they deal with uncertainty. This is represented by an agent property, called the r-parameter (household-risk-att in the code). The r-parameter is catch-all for various factors that form an agent’s disposition to act in a certain way, such as: uncertainty in the sensing (partial observability of the resource system), noise in the information received, or an inherent characteristic of the agent, for instance, their risk attitude.
Benchmark for DMASON
Andreu Moreno Vendrell Eduardo César Anna Sikora Josep Jorba Cristina Peralta Quesada | Published Friday, November 22, 2024Agent-based modeling and simulation (ABMS) is a class of computational models for simulating the actions and interactions of autonomous agents with the goal of assessing their effects on a system as a whole. Several frameworks for generating parallel ABMS applications have been developed taking advantage of their common characteristics, but there is a lack of a general benchmark for comparing the performance of generated applications. We propose and design a benchmark that takes into consideration the most common characteristics of this type of applications and includes parameters for influencing their relevant performance aspects. We provide an initial implementation of the benchmark for DMASON parallel ABMS platform, and we use it for comparing the applications generated by these platforms.
Displaying 4 of 14 results for "Christian Möllmann" clear search