About the CoMSES Model Library more info
Our mission is to help computational modelers at all levels engage in the establishment and adoption of community standards and good practices for developing and sharing computational models. Model authors can freely publish their model source code in the Computational Model Library alongside narrative documentation, open science metadata, and other emerging open science norms that facilitate software citation, reproducibility, interoperability, and reuse. Model authors can also request peer review of their computational models to receive a DOI.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
We also maintain a curated database of over 7500 publications of agent-based and individual based models with additional detailed metadata on availability of code and bibliometric information on the landscape of ABM/IBM publications that we welcome you to explore.
Displaying 10 of 922 results for "Chantal van Esch" clear search
Crowdworking Model
Georg Jäger | Published Wednesday, September 25, 2019The purpose of this agent-based model is to compare different variants of crowdworking in a general way, so that the obtained results are independent of specific details of the crowdworking platform. It features many adjustable parameters that can be used to calibrate the model to empirical data, but also when not calibrated it yields essential results about crowdworking in general.
Agents compete for contracts on a virtual crowdworking platform. Each agent is defined by various properties like qualification and income expectation. Agents that are unable to turn a profit have a chance to quit the crowdworking platform and new crowdworkers can replace them. Thus the model has features of an evolutionary process, filtering out the ill suited agents, and generating a realistic distribution of agents from an initially random one. To simulate a stable system, the amount of contracts issued per day can be set constant, as well as the number of crowdworkers. If one is interested in a dynamically changing platform, the simulation can also be initialized in a way that increases or decreases the number of crowdworkers or number of contracts over time. Thus, a large variety of scenarios can be investigated.
ABM for Underwater optical wireless communication in a water tank
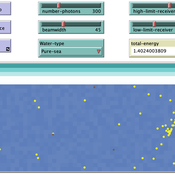
Mohamed ABID | Published Sunday, May 29, 2022This model simulates the propagation of photons in a water tank. A source of light emits an impulse of photons with equal energy represented by yellow dots. These photons are then scattered by water particles before possibly reaching the photo-detector represented by a gray line. Different types of water are considered. For each one of them we calculate the total received energy.
The water tank is represented by a blue rectangle with fixed dimensions. It’s exposed to the air interface and has totally absorbent barriers. Four types of water are supported. Each one is characterized by its absorption and scattering coefficients.
At the source, the photons are generated uniformly with a random direction within the beamwidth. Each photon travels a random distance drawn from a distribution depending on the water characteristics before encountering a water particle.
Based on the updated position of the photon, three situations may occur:
-The photon hits the barrier of the tank on its trajectory. In this case it’s considered as lost since the barriers are assumed totally absorbent.
…
UK Demographic Simulator
Tony Lawson | Published Monday, February 27, 2012 | Last modified Tuesday, October 21, 2014A dynmaic microsimulation model to project the UK population over time
Extended Flache and Mas (2008)
Hadi Aliahmadi | Published Wednesday, August 16, 2017 | Last modified Monday, February 26, 2018We extend the Flache-Mäs model to incorporate the location and dyadic communication regime of the agents in the opinion formation process. We make spatially proximate agents more likely to interact with each other in a pairwise communication regime.
Smallholder Behavioural Decisions During Times of Drought Stress
Samantha Dobbie | Published Sunday, September 15, 2013 | Last modified Saturday, September 27, 2014An empirical ABM of smallholder decisions in times of drought stress.
TIP TOP Landscape
Patrick Taillandier Nesrine Ayari Claude Janin Benoit Sarrazin Dominique Trévisan | Published Wednesday, September 04, 2019The model aims at reproducing the evolution of the land-use in an agricultural territory at the plot scale. It enables to simulate the affectation of land-use, the crop rotation and technical operations for each plot of the different farms of the territory. It allows as well for crop farms to simulate the daily state of plots (sowed, plowed, harvested, biomass indicator). The model is used as an input for the water pollution model allowing to determine the flow of nitrate, phosphorus and suspended matter in the territory according to the landscape configuration.
Replication of ECEC model: Environmental Feedback and the Evolution of Cooperation
Pierre Bommel | Published Tuesday, April 05, 2011 | Last modified Saturday, April 27, 2013The model, presented here, is a re-implementation of the Pepper and Smuts’ model : - Pepper, J.W. and B.B. Smuts. 2000. “The evolution of cooperation in an ecological context: an agent-based model”. Pp. 45-76 in T.A. Kohler and G.J. Gumerman, eds. Dynamics of human and primate societies: agent-based modeling of social and spatial processes. Oxford University Press, Oxford. - Pepper, J.W. and B.B. Smuts. 2002. “Assortment through Environmental Feedback”. American Naturalist, 160: 205-213 […]

Peer reviewed Organizational behavior in the hierarchy model
Smarzhevskiy Ivan | Published Tuesday, June 18, 2019 | Last modified Wednesday, July 31, 2019In a two-level hierarchical structure (consisting of the positions of managers and operators), persons holding these positions have a certain performance and the value of their own (personal perception in this, simplified, version of the model) perception of each other. The value of the perception of each other by agents is defined as a random variable that has a normal distribution (distribution parameters are set by the control elements of the interface).
In the world of the model, which is the space of perceptions, agents implement two strategies: rapprochement with agents that perceive positively and distance from agents that perceive negatively (both can be implemented, one of these strategies, or neither, the other strategy, which makes the agent stationary). Strategies are implemented in relation to those agents that are in the radius of perception (PerRadius).
The manager (Head) forms a team of agents. The performance of the group (the sum of the individual productivities of subordinates, weighted by the distance from the leader) varies depending on the position of the agents in space and the values of their individual productivities. Individual productivities, in the current version of the model, are set as a random variable distributed evenly on a numerical segment from 0 to 100. The manager forms the team 1) from agents that are in (organizational) radius (Op_Radius), 2) among agents that the manager perceives positively and / or negatively (both can be implemented, one of the specified rules, or neither, which means the refusal of the command formation).
Agents can (with a certain probability, given by the variable PrbltyOfDecisn%), in case of a negative perception of the manager, leave his group permanently.
It is possible in the model to change on the fly radii values, update the perception value across the entire population and the perception of an individual agent by its neighbors within the perception radius, and the probability values for a subordinate to make a decision about leaving the group.
You can also change the set of strategies for moving agents and strategies for recruiting a team manager. It is possible to add a randomness factor to the movement of agents (Stoch_Motion_Speed, the default is set to 0, that is, there are no random movements).
…
The relationship between product information quantity and diversity of consumer decisions
Takao Sasaki Marco Janssen David Vaughn Becker Rebecca Neel | Published Tuesday, October 27, 2015We developed an agent-based model to explore underlying mechanisms of behavioral clustering that we observed in human online shopping experiments.
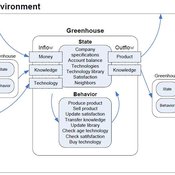
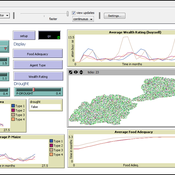
Universal Darwinism in Dutch Greenhouses
Julia Kasmire | Published Wednesday, May 09, 2012 | Last modified Saturday, April 27, 2013An ABM, derived from a case study and a series of surveys with greenhouse growers in the Westland, Netherlands. Experiments using this model showshow that the greenhouse horticulture industry displays diversity, adaptive complexity and an uneven distribution, which all suggest that the industry is an evolving system.
Displaying 10 of 922 results for "Chantal van Esch" clear search